
Go 开发者必读:CPU 高速缓存原理和应用
据三届世界冠军F1赛车手杰基·斯图尔特(Jackie Stewart)称,他对汽车的工作原理有所了解,使他成为一名更好的飞行员。
“您不必成为一名工程师就可以成为赛车手,但是您必须具有机械同情心(可以理解为机械之心,这个短语源于赛车驾驶,它反映了驾驶员对于汽车有一种天生的感觉,所以他们对于如何最佳的驾御它非常有感觉。)”
Martin Thompson(LMAX Disruptor的设计师)将机械同情的概念应用于编程。简而言之,了解底层硬件将使我们在设计算法,数据结构等方面成为更好的开发人员。
在本文中,我们将深入研究处理器,并了解在优化解决方案时理解其某些概念可以如何帮助我们。
基础知识
现代处理器是基于多重处理器的概念(SMP)。 在多重处理器系统中,处理器的设计使两个或多个内核连接到共享内存(也称为主内存或RAM)。另外,为了加快内存访问速度,处理器具有三个不同的缓存级别,分别为L1,L2和L3。精确的架构可能会非常依赖于提供商,处理器型号等。 然而,最常见的模型是让L1和L2 本地到一个核,而L3 在所有核之间共享:
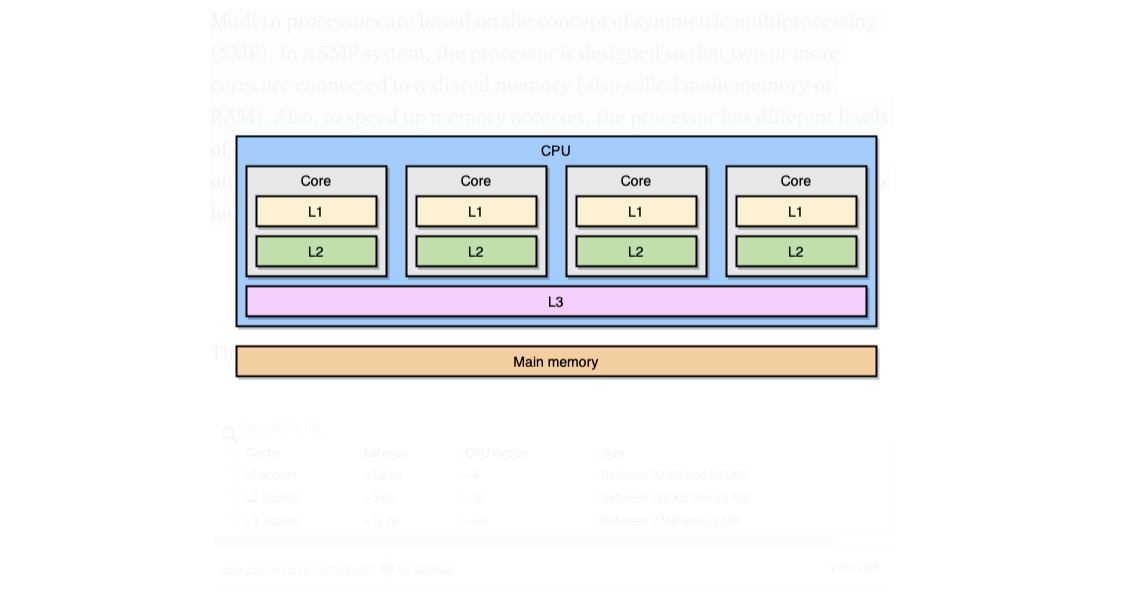
缓存离CPU内核越近,其访问延迟和大小越小:
| 缓存 | 延迟 | CPU 周期 | 大小 |
|---|---|---|---|
| L1 访问 | ~1.2 ns | ~4 | 32 KB - 512 KB |
| L2 访问 | ~3 ns | ~10 | 128 KB - 24 MB |
| L3 访问 | ~12 ns | ~40 | 2 MB - 32 MB |
同样,这些确切数字取决于处理器型号。但是,粗略估算一下:如果我们认为访问主内存需要60 ns,则访问L1的速度大约快50倍。
在处理器世界中,有一个重要的概念称为``引用位置**''。当处理器访问特定的内存位置时,很有可能:
- 它将在不久的将来访问相同的位置:这是“时间位置”原则。
- 它将访问附近的存储位置:这是“空间位置”原则。
时间局部性是拥有CPU缓存的原因之一。但是,我们如何利用空间局部性?解决方案不是复制单个内存位置到CPU缓存,而是复制缓存行。高速缓存行是内存的“连续”段。
高速缓存行的大小取决于高速缓存级别(以及处理器型号)。例如,这是我的机器上的L1高速缓存行的大小:
$ sysctl -a | grep cacheline
hw.cachelinesize: 64
处理器将复制64个字节的连续段,而不是将单个变量复制到L1高速缓存。例如,它不会复制Go切片的单个int64元素,而是会复制该元素以及七个int64元素。
缓存行在Go中的具体应用
让我们来看一个具体的例子,它将会向我们展示CPU缓存的好处。在下面的代码中,我们将合并两个int64元素的平方矩阵:
func BenchmarkMatrixCombination(b *testing.B) {
matrixA := createMatrix(matrixLength)
matrixB := createMatrix(matrixLength)
for n := 0; n < b.N; n++ {
for i := 0; i < matrixLength; i++ {
for j := 0; j < matrixLength; j++ {
matrixA[i][j] = matrixA[i][j] + matrixB[i][j]
}
}
}
}将 matrixLength 设置为64k, 将导致以下结果:
BenchmarkMatrixSimpleCombination-64000 8
130724158 ns/op
现在, 我们将添加 matrixB[i][j] 而不是添加 matrixB[j][i]:
func BenchmarkMatrixReversedCombination(b *testing.B) {
matrixA := createMatrix(matrixLength)
matrixB := createMatrix(matrixLength)
for n := 0; n < b.N; n++ {
for i := 0; i < matrixLength; i++ {
for j := 0; j < matrixLength; j++ {
matrixA[i][j] = matrixA[i][j] + matrixB[j][i]
}
}
}
}它会影响结果吗?
BenchmarkMatrixCombination-64000 8
130724158 ns/op
BenchmarkMatrixReversedCombination-64000 2
573121540 ns/op
相当彻底!我们如何解释呢?
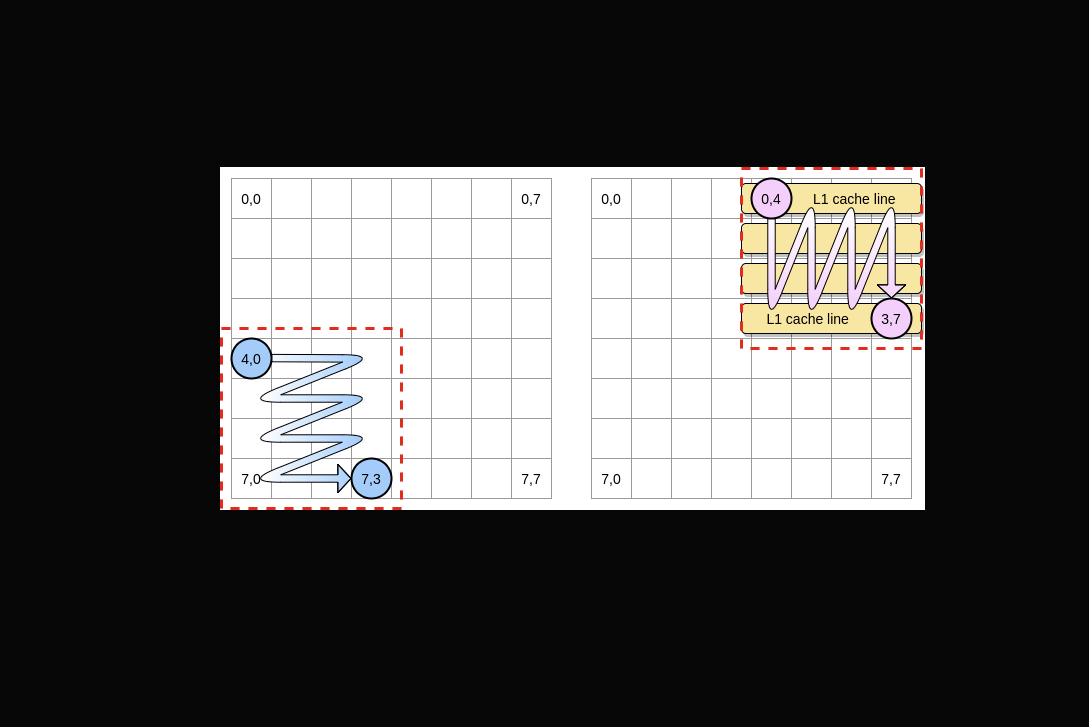
让我们尝试绘制正在发生的事情。蓝色圆圈是第一个矩阵上的指针,粉色圆圈是第二个矩阵上的指针。因为我们必须设置 matrixA[i][j] = matrixA[i][j] + matrixB[j][i], 所以当蓝色指针位于位置(4,0)时,粉红色一个在位置(0,4):
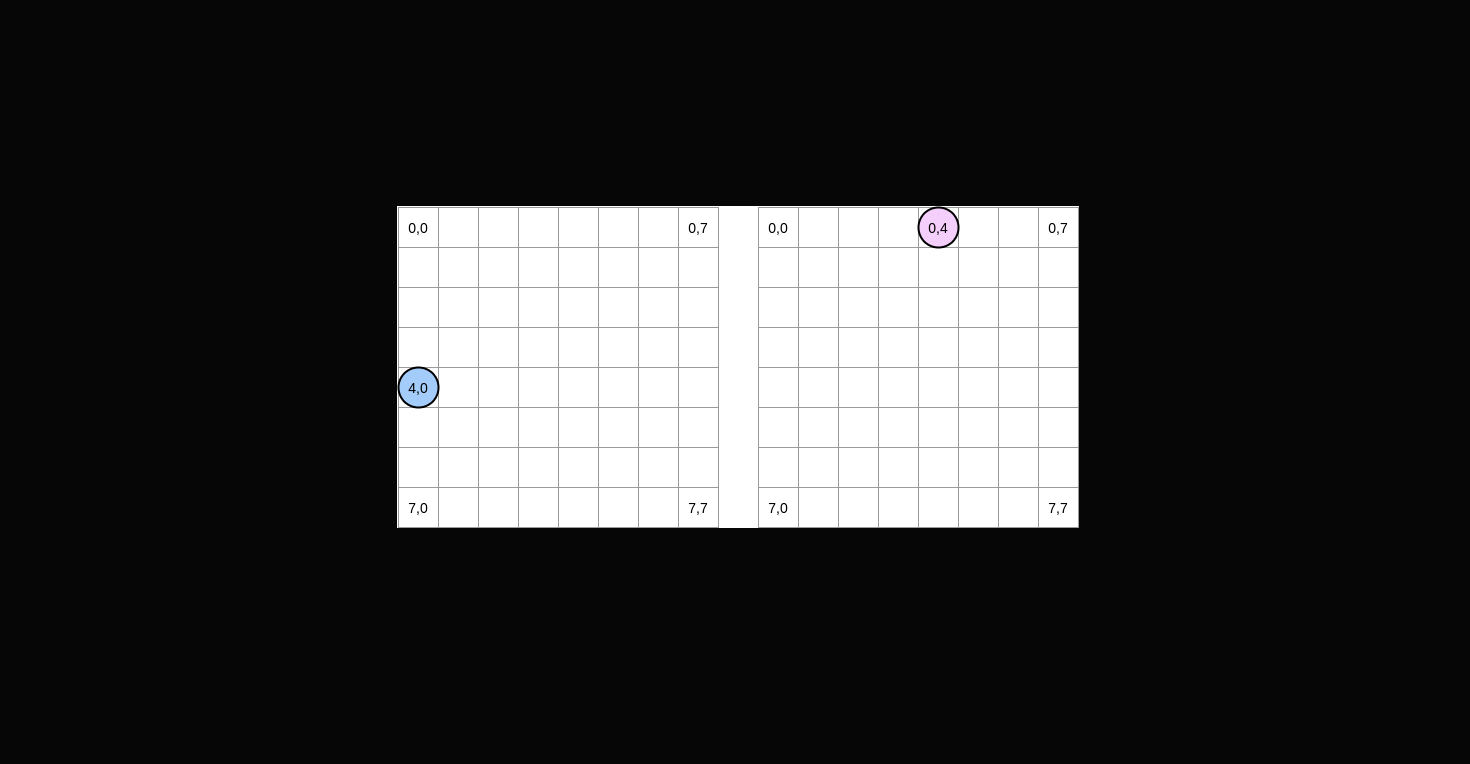
在这幅图中,我们用横坐标和纵坐标表示矩阵,(0,0) 位于正方形左上方。在内存中,矩阵所有不同行是连续分配的。但是,为了清楚,我们坚持用数学表示法。
此外,在以下例子中,矩阵大小是缓存行大小的数倍。所以,一个缓存行不会在下一行“超载”。
我们如何对两个矩阵进行迭代呢?蓝色指针向右移动,直到到达最后一列,然后移动到 (5,0) 的下一行,以此类推。相反地,红色指针向下移动,然后到达下一列。
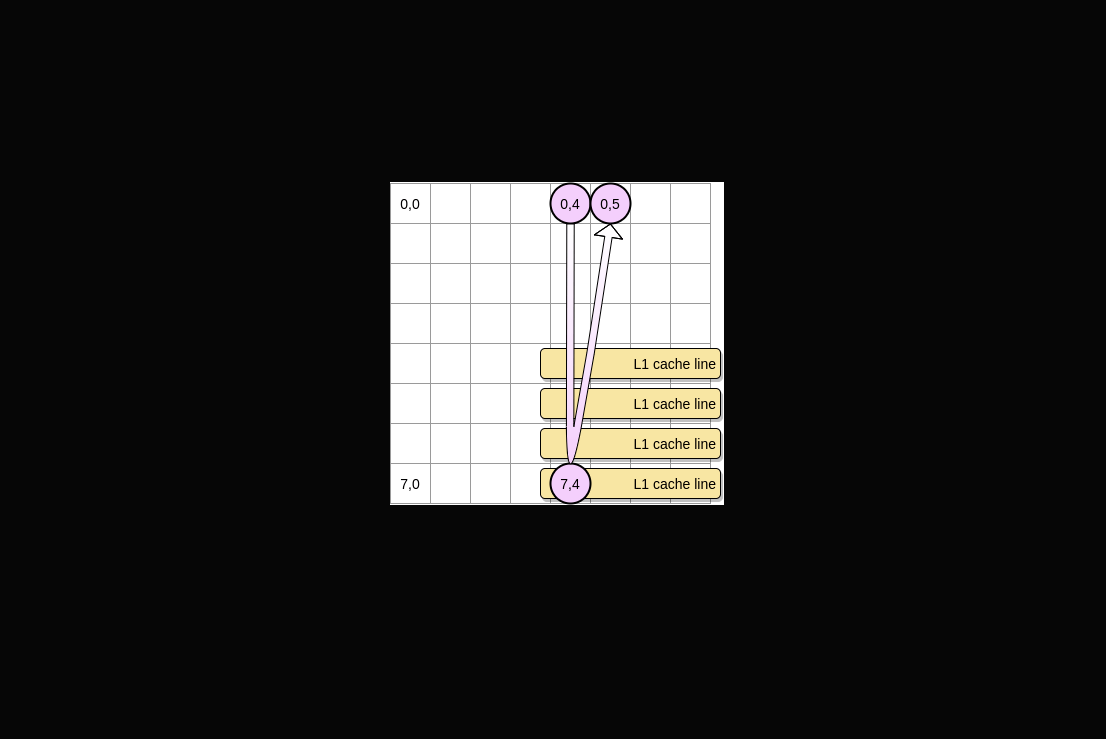
当粉红色指针访问位置(0,4)时,处理器将缓存整行(在我们的示例中,缓存行大小为4个元素)。因此,当粉红色指针到达位置(0,5)时,我们可以假定变量已经存在于L1中,不是吗?
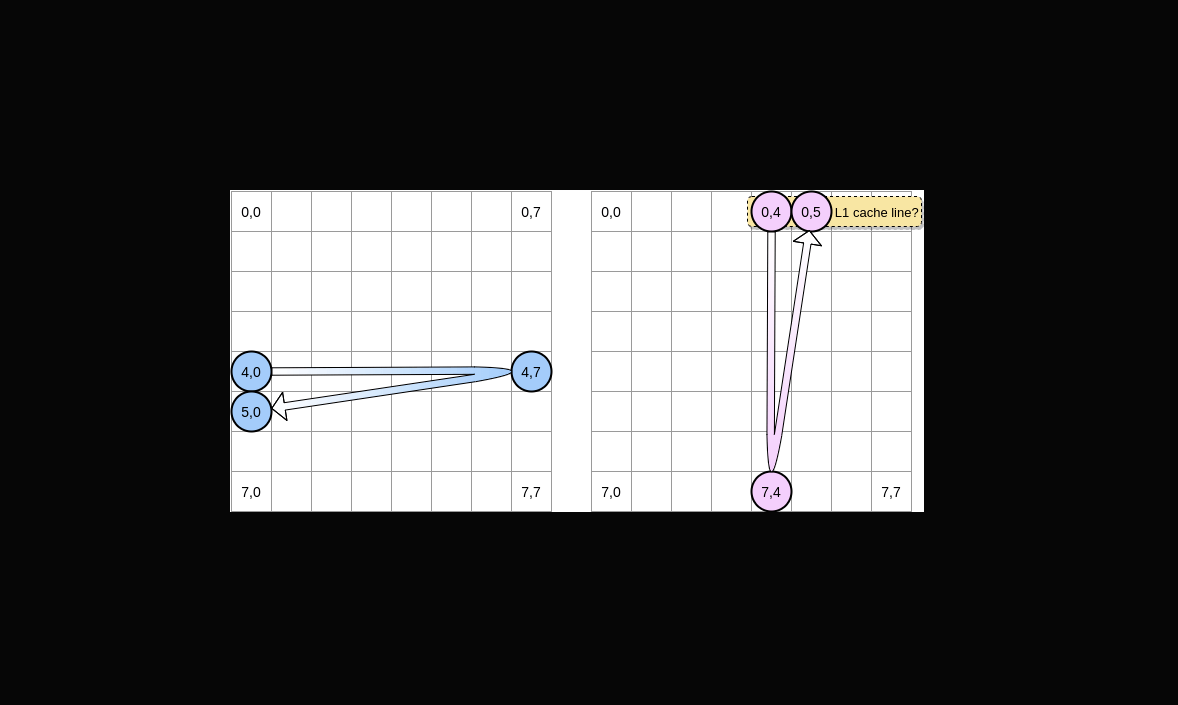
答案取决于 matrix size:
- 如果矩阵与 L1 的大小相比足够小,则可以,元素(0,5)已被缓存。
- 否则,缓存行将在指针到达位置(0,5)之前从 L1 退出。因此,它将生成高速缓存未命中,处理器将不得不以不同的方式访问变量(例如,使用 L2 )。我们将处于这样的状态:
矩阵应从L1中受益多少?让我们做一些数学运算。首先,我们需要知道L1缓存的大小是多少:
$ sysctl hw.l1dcachesize
hw.l1icachesize: 32768
在我的机器上,L1缓存为32768字节,而L1缓存行为64字节。因此,我可以在L1上存储多达512条缓存行。如果我们使用由512个元素组成的矩阵运行相同的基准测试,该怎么办?
BenchmarkMatrixCombination-512 1404 718594 ns/op
BenchmarkMatrixReversedCombination-512 1363 850141 ns/opp
尽管我们缩小了差距(使用64k矩阵,它的速度要慢约300%),但我们仍然可以看到微小的差异。有什么事吗在基准测试中,我们处理两个矩阵。因此,CPU必须为两者存储高速缓存行。在理想环境中(无需运行其他应用程序等),由于第一个矩阵,L1高速缓存已满,而由于第二个矩阵,L1高速缓存已满。如果再次将矩阵大小除以2以处理256个元素怎么办:
BenchmarkMatrixCombination-256 5712 176415 ns/op
BenchmarkMatrixReversedCombination-256 6470 164720 ns/op
现在,我们终于到达了两个结果(几乎)相等的地步。
为什么第二个基准比第一个基准稍快?差异看起来非常微妙,并且与Go产生的汇编代码有关。在第二种情况下,使用LEA(加载有效地址)指令对第二矩阵上的指针进行不同的管理。当处理器需要访问内存位置时,存在从虚拟内存到物理内存的转换。使用LEA可以计算内存地址,而无需执行此转换。例如,如果我们管理一片int64元素,并且在第一个元素地址上已经有一个指针,则可以通过简单地将指针移至8个字节来使用LEA加载第二个元素地址。在我们的示例中,这可能是第二次测试更快的潜在原因。但是,我不是装配专家,请随时挑战此分析。如果您想看一下,我上传了第一个函数的汇编代码和第二个函数的汇编代码(反向)。
现在,在矩阵较大的情况下,如何限制处理器高速缓存未命中的影响?有一种技术叫做 loop nest optimization。我们只需要在给定的块内进行迭代,以尽可能多地受益于高速缓存行。
让我们在示例中将一个块定义为4个元素的正方形。在第一个矩阵上,我们从(4,0)迭代到(4,3)。然后我们切换到下一行。因此,在切换到下一列之前,我们仅在第二矩阵上从(0,4)迭代到(3,4)。
当粉红色指针遍历第一列时,处理器将存储相应的缓存行。因此,对块的其余部分进行迭代意味着可以从L1中受益:
让我们编写该算法的Go实现,但首先,我们必须仔细选择块大小。在前面的示例中,它等于高速缓存行。它不应较小,否则,我们将存储将不被访问的元素。在Go基准测试中,我们存储int64元素(8个字节)。高速缓存行为64字节,因此可以存储8个元素。然后,块大小值应至少为8:
func BenchmarkMatrixReversedCombinationPerBlock(b *testing.B) {
matrixA := createMatrix(matrixLength)
matrixB := createMatrix(matrixLength)
blockSize := 8
for n := 0; n < b.N; n++ {
for i := 0; i < matrixLength; i += blockSize {
for j := 0; j < matrixLength; j += blockSize {
for ii := i; ii < i+blockSize; ii++ {
for jj := j; jj < j+blockSize; jj++ {
matrixA[ii][jj] = matrixA[ii][jj] + matrixB[jj][ii]
}
}
}
}
}
}现在,与遍历整个行/列时相比,我们的实现要快67%以上:
BenchmarkMatrixReversedCombination-64000 2 573121540 ns/op
BenchmarkMatrixReversedCombinationPerBlock-64000 6 185375690 ns/op
这是第一个示例,说明了解CPU缓存的工作方式可能有助于我们设计更高效的算法。
错误分享
现在,我们应该对处理器如何管理其内部缓存有很好的了解。快速回顾一下:
- 由于空间局部性原则,处理器不会将简单的内存地址放在缓存行中。
- L1缓存对于给定的CPU内核是本地的。
现在,让我们通过一个示例来讨论L1缓存的一致性。主存储器中存储了两个变量var1和var2。一个核心上的一个线程访问var1,而另一个核心上的另一个线程访问var2。假设两个变量是连续的(或几乎是连续的),我们最终会遇到两个缓存中都存在var2的情况:
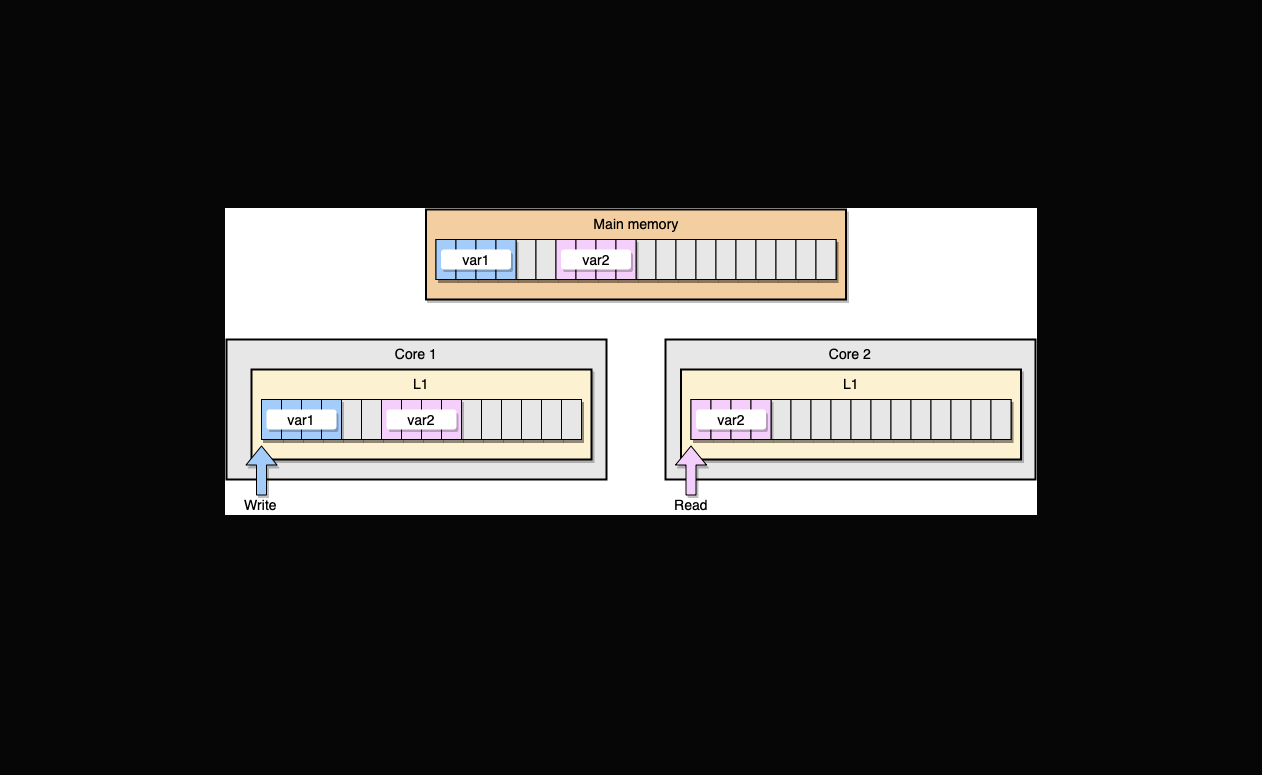
如果第一个线程更新其缓存行会怎样?它可能会更新其行的任何位置,包括var2。然后,当第二个线程读取var2时,该值可能不再一致。
处理器如何维护缓存一致性?如果两条高速缓存行共享一些公共地址,则处理器会将它们标记为 Shared。如果一个线程修改了 Shared 行,它将都标记为 Modified 。为了保证高速缓存的一致性,它需要内核之间的协调,这可能会大大降低应用程序的性能。此问题称为false sharing。
让我们看看Go中的具体应用。在此示例中,我们一个接一个地实例化两个结构。因此,这些结构应在内存中连续分配。然后,我们创建两个goroutine,其中每个goroutine都访问其结构(M是等于1百万的常数):
type SimpleStruct struct {
n int
}
func BenchmarkStructureFalseSharing(b *testing.B) {
structA := SimpleStruct{}
structB := SimpleStruct{}
wg := sync.WaitGroup{}
b.ResetTimer()
for i := 0; i < b.N; i++ {
wg.Add(2)
go func() {
for j := 0; j < M; j++ {
structA.n += j
}
wg.Done()
}()
go func() {
for j := 0; j < M; j++ {
structB.n += j
}
wg.Done()
}()
wg.Wait()
}
}在此示例中,第二个结构的变量n仅由第二个goroutine访问。但是,由于结构在内存中是连续的,因此它会出现在两条高速缓存行中(假设两个goroutine都安排在位于单独内核上的线程上进行了调度,不一定是这种情况)。这是基准测试结果:
BenchmarkStructureFalseSharing 514 2641990 ns/op
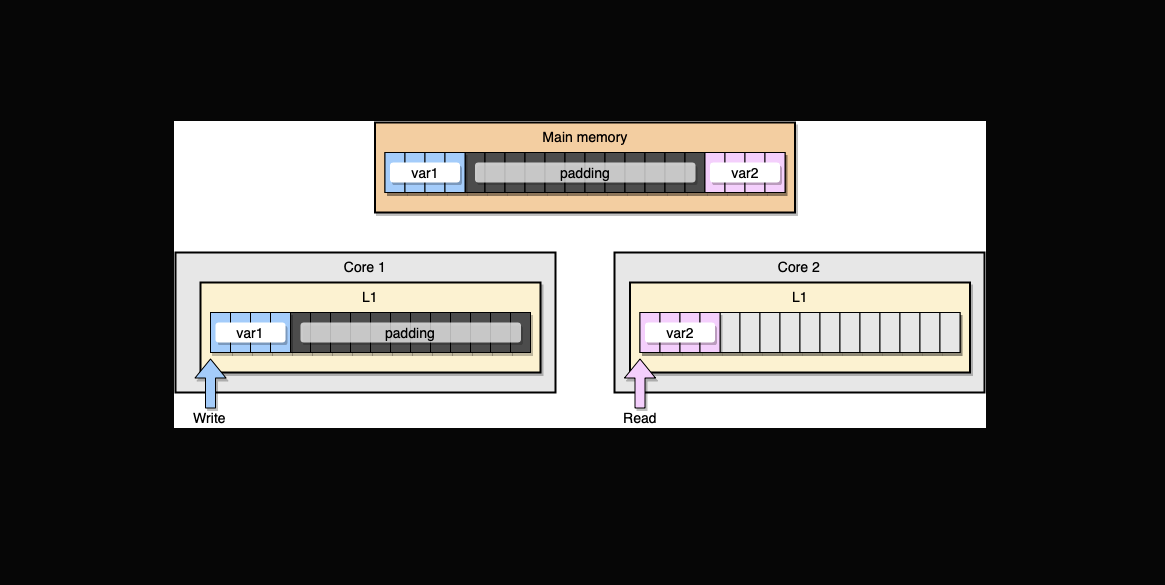
我们如何防止虚假共享?一种解决方案是使用memory padding。目的是确保两个变量之间有足够的空间,以便它们属于不同的缓存行。
首先,让我们在变量声明后填充内存,以创建先前结构的替代方案:
type PaddedStruct struct {
n int
_ CacheLinePad
}
type CacheLinePad struct {
_ [CacheLinePadSize]byte
}
const CacheLinePadSize = 64然后,我们实例化这两个结构,并在单独的 goroutine 中访问这两个变量:
func BenchmarkStructurePadding(b *testing.B) {
structA := PaddedStruct{}
structB := SimpleStruct{}
wg := sync.WaitGroup{}
b.ResetTimer()
for i := 0; i < b.N; i++ {
wg.Add(2)
go func() {
for j := 0; j < M; j++ {
structA.n += j
}
wg.Done()
}()
go func() {
for j := 0; j < M; j++ {
structB.n += j
}
wg.Done()
}()
wg.Wait()
}
}内存方面,这个例子应该是这样的,两个变量是不同缓存行的一部分:
让我们看看结果:
BenchmarkStructureFalseSharing 514 2641990 ns/op
BenchmarkStructurePadding 735 1622886 ns/op
我们使用填充的第二个示例比最初的实现快 40% 左右🎉. 不过,这是一个折衷方案。为了加快执行时间,内存填充需要分配更多内存。
机械同情是应用程序优化中的一个重要概念。在本文中,我们看到了一些示例,这些示例表明了解CPU处理器的工作方式有助于我们减少执行时间。
本文中的所有译文仅用于学习和交流目的,转载请务必注明文章译者、出处、和本文链接
我们的翻译工作遵照 CC 协议,如果我们的工作有侵犯到您的权益,请及时联系我们。












 关于 LearnKu
关于 LearnKu




推荐文章: