
监督学习基础概念
0 / 1 / 创建于 6年前 /
 Galois 的个人博客
Galois 的个人博客
监督学习简介
给定一组数据点 \lbrace x^{(1)},…,x^{(m)}\rbrace 和与其对应的输出 {y^{(1)},…,y^{(m)}},我们想要建立一个分类器,学习如何从 x 预测 y。
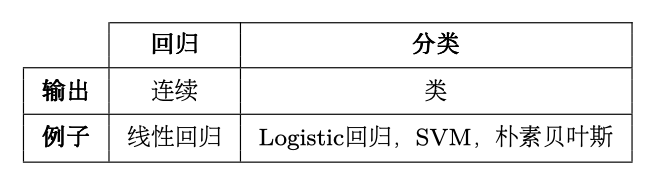
预测类型
不同类型的预测模型总结如下表:
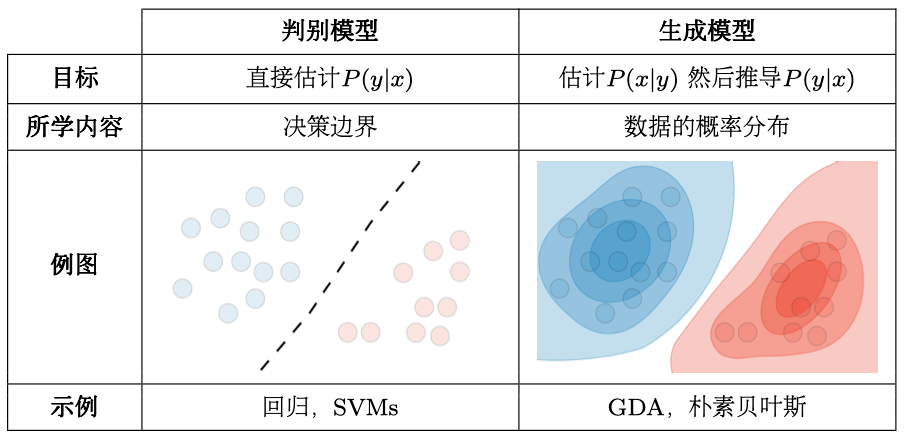
型号类型
不同型号总结如下表:
符号和一般概念
假设
假设我们选择的模型是h_\theta。对于给定的输入数据x^{(i)},模型预测输出是h_\theta(x^{(i)})。
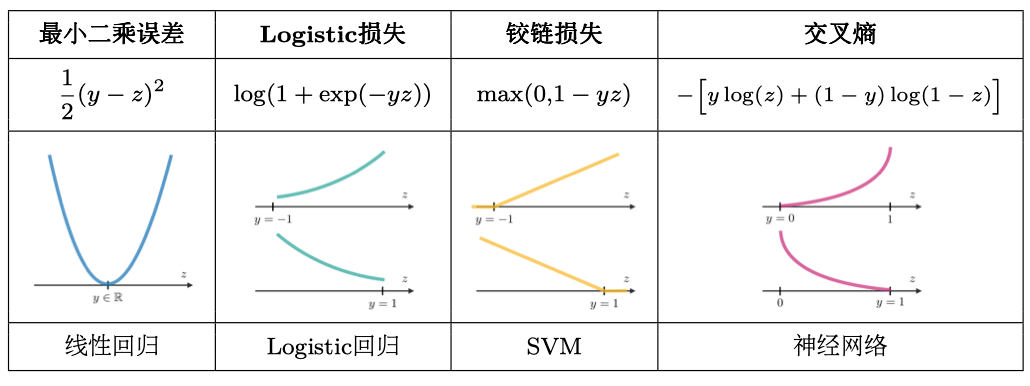
损失函数
损失函数是一个L:(z,y)\in \R \times Y \rightarrow L(z,y)\in \R的函数,其将真实数据值 y 和其预测值 z 作为输入,输出他们的不同程度。常见的损失函数总结如下表:
成本函数
成本函数J通常用于评估模型的性能,使用损失函数L定义如下:
J(\theta)=\sum\limits_{i=1}^mL(h_\theta(x^{(i)}),y^{(i)})
梯度下降
记学习率为\alpha\in \R,梯度下降的更新规则使用学习率和成本函数J,表示如下:
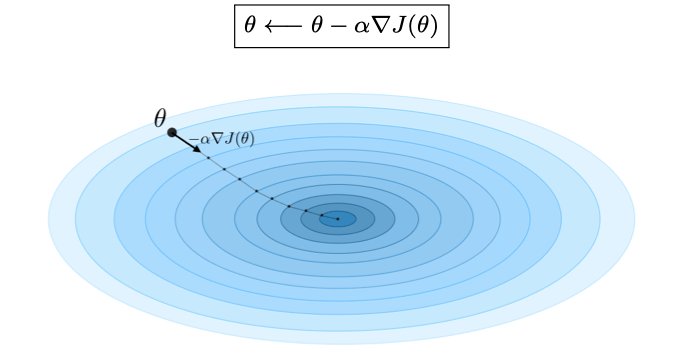
备注:随机梯度下降(SGD)是根据每个训练样本进行参数更新,而批量梯度下降是在一批训练样本 上进行更新。
似然
给定参数\theta的模型L(\theta)的似然性通过最大化似然性来找到最佳参数\theta。在实践中,我们使用更容易优化的对数似然l(\theta)=\log(L(\theta))。我们有:
\theta^{opt}=\arg \max L(\theta)
牛顿算法
牛顿算法是一种数值方法,目的是找到一个\theta使得l^\prime(\theta)=0,其更新规则如下:
\theta\leftarrow \theta - \frac{l^\prime(\theta)}{l^{\prime\prime}(\theta)}
备注:多维泛化,也称为Newton-Raphson 方法,具有以下更新规则:
\theta\leftarrow \theta - (\nabla_\theta^2l(\theta))^{-1}\nabla_\theta l(\theta)
本作品采用《CC 协议》,转载必须注明作者和本文链接







 关于 LearnKu
关于 LearnKu




监督学习被说的这么简单,清晰明了,👍