
一文彻底读懂 hystrix-go 源码
1 / 1 / 创建于 5年前 /
 Remember 的个人博客
Remember 的个人博客
开篇
上篇文章主要介绍了 hystrix-go 的使用以及原理,这篇文章让我们全面的解析源码。本文很长,请耐心看完。另外,由于直接放源码很是影响手机阅读体验,我把源码都截成图片了。
还是上篇的例子
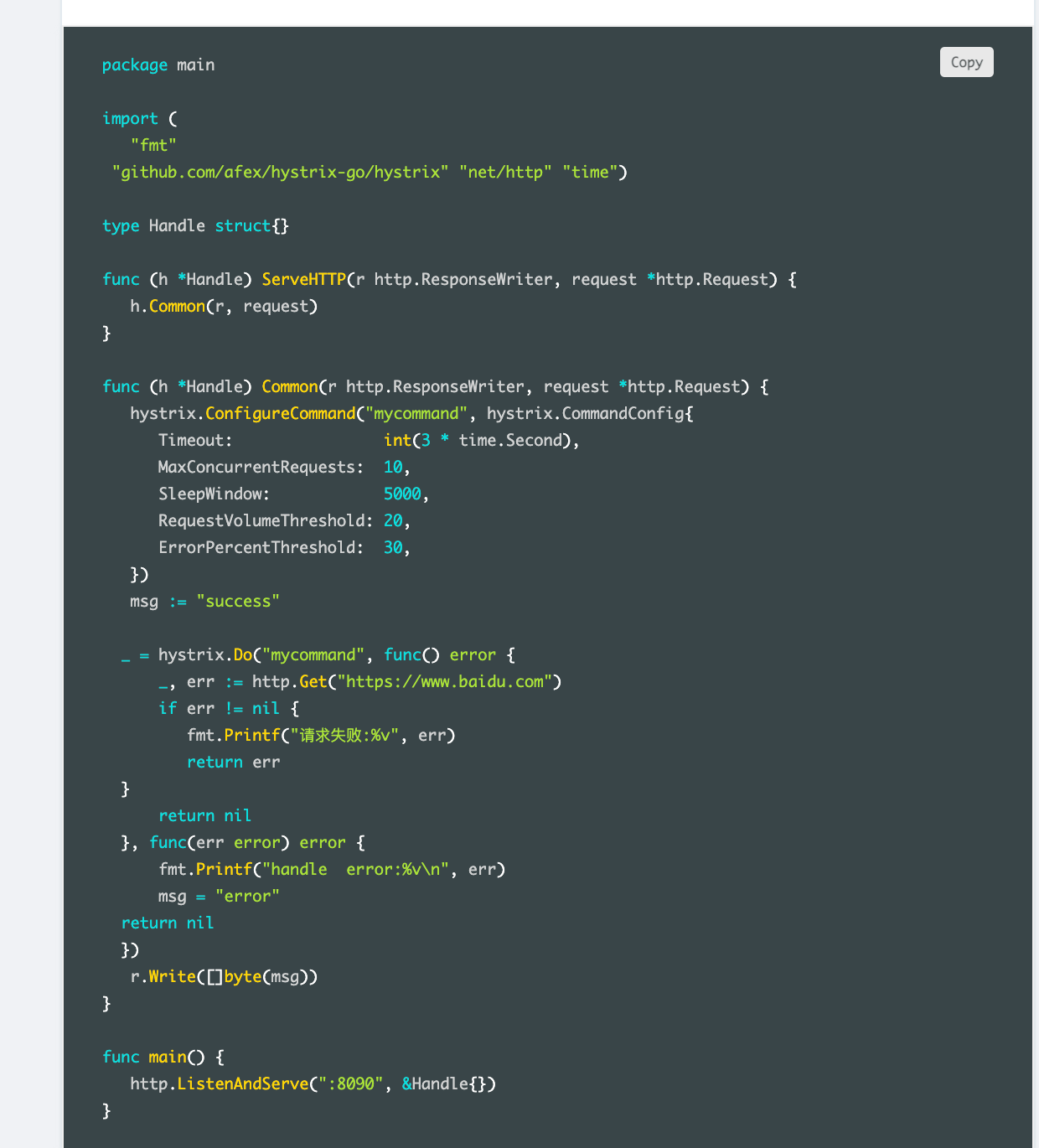
大部分文章只是说明每个模块的职责和功能,考虑到如果只是单纯说明,读者还是很难把整体的流程连接起来。因此我打算从这个例子一步步解析。
就直接从开头 hystrix.ConfigureCommand 开始吧。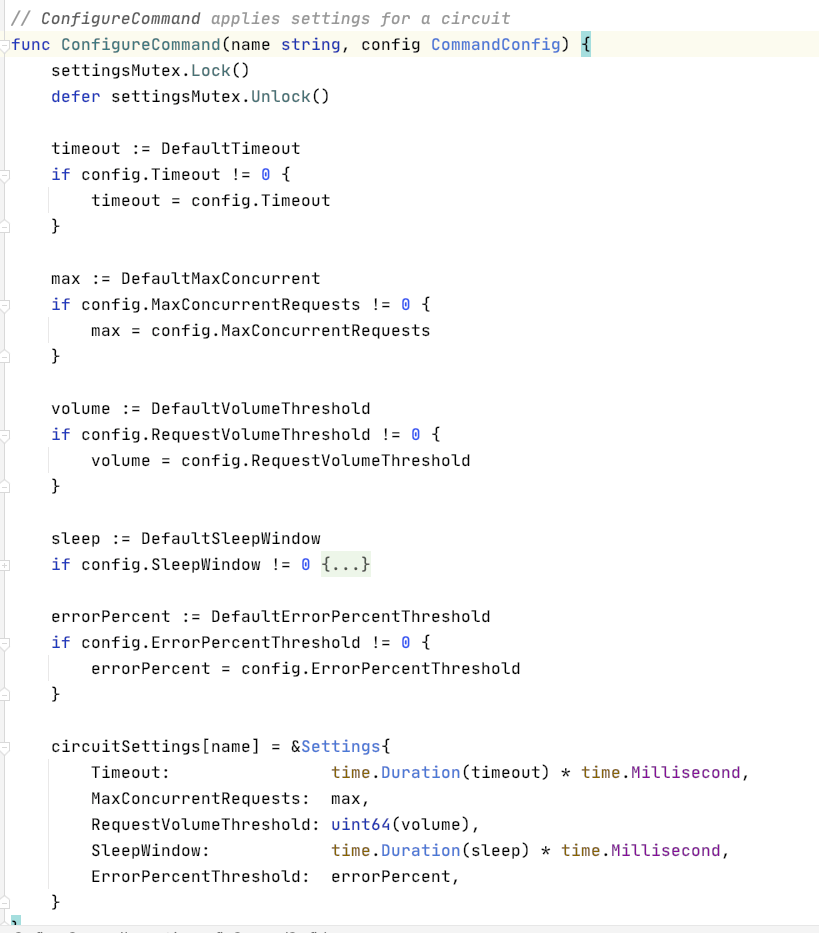
上篇文章提过,这个操作主要是为每个 commandName 自定义自己的规则配置。如果未自定义,那么会使用默认值。 最终会把配置值存储在 circuitSettings 这个 map类型中,它的初始化操作是在 init()执行的。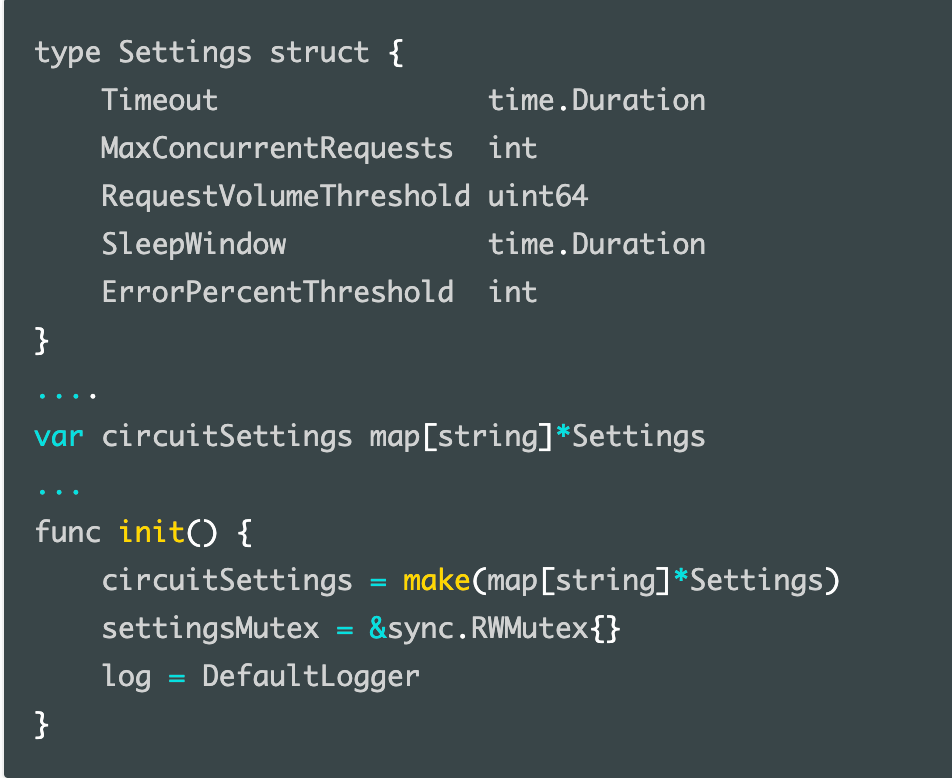
接下来执行 hystrix.Do, Do 是一个同步的操作,它会阻塞等待,直到执行函数结束或者熔断器返回错误,如:断路器开启、超出最大并发数。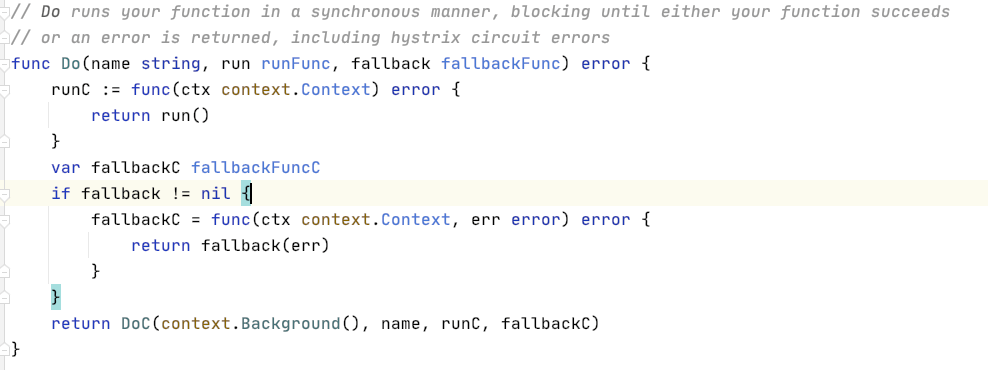
此函数需要三个参数,第一个参数表示 commandName 的名称,第二个参数就是正常的业务的匿名函数,比如在函数中进行外部服务调用。如果调用失败,那么就会执行第三个参数的操作,我们可以称之为保底操作,当熔断器开启的时候,系统也是会直接调用此函数。这两个参数的类型分别是匿名函数和闭包函数。
从图中可以看出,Do 函数只是把传入的后两个参数进一步封装成函数。然后调用 DoC。

Doc 函数第一个参数是上下文 context.Context。context.Context 一般出现在不同 Goroutine 之间同步指定数据。如果你使用过 gin 框架,经常和它打交道。
第三和第四的参数即 Do 中进一步包装的两个闭包函数。所谓闭包,我的理解是:存在自由的变量。这个自由的变量取决于运行闭包函数时的环境,在 DoC中,runFunc 和 fallbackFuncC 类型
也就是说这两个闭包的自由变量是 context.Context。
Doc函数中 变量 r 和 f 不再解释。由于我们在调用 Do函数时传递了第三个参数,因此执行 errChan = GoC(ctx, name, r, f)。最下面使用select 可以监控多 channel。当某个 channel 有数据时,从其中读取。我们接着往下看 GoC。
Goc是核心代码块。它是真正执行你的核心业务函数的地方。我先大体介绍一些这个函数核心功能。
它会先去验证一些规则,比如判断熔断器是否开启,决定当前是否可以执行你的业务。判断是否可以获取访问令牌。如果可以,执行你的业务逻辑,成功了上报成功的状态,失败了,除了上报状态,如果传入了异常处理的函数,那么执行异常处理的函数。另外还有一些归还令牌等操作。我们来看代码。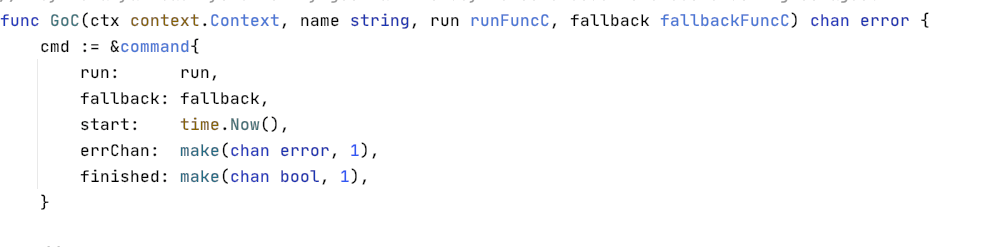
这段代码就不解释了吧。但是我们可以来看看 command 结构体中还有啥参数。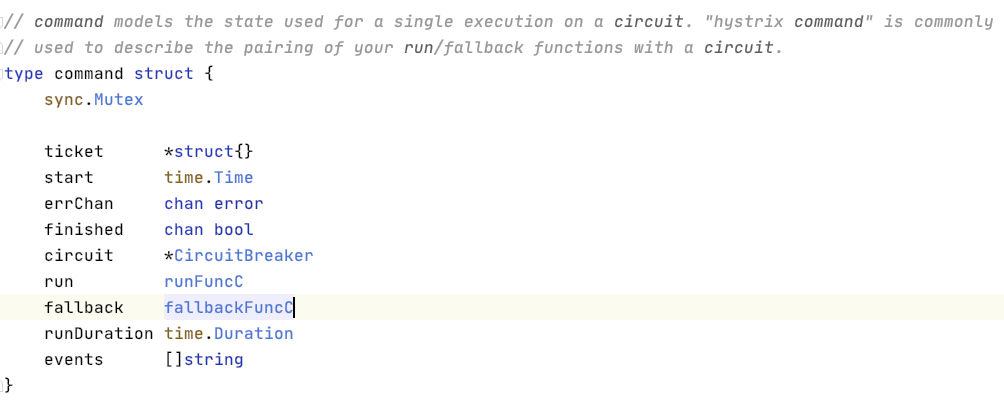
command 里面,关键的两个字段是 events 和 circuit。其实 events 主要是存储事件类型信息,比如执行成功的 success,或者失败的 timeout、context_canceled 等。 circuit 是指针类型 CircuitBreaker, CircuitBreaker就是真正的熔断器 。command 主要是记录单个执行的状态以及和熔断器进行一些运行交互。交互什么? 主要向 CircuitBreaker 上报执行状态事件。
接下来看下面的代码
GetCircuit(name),从函数名就知道是通过名称获取一个熔断器。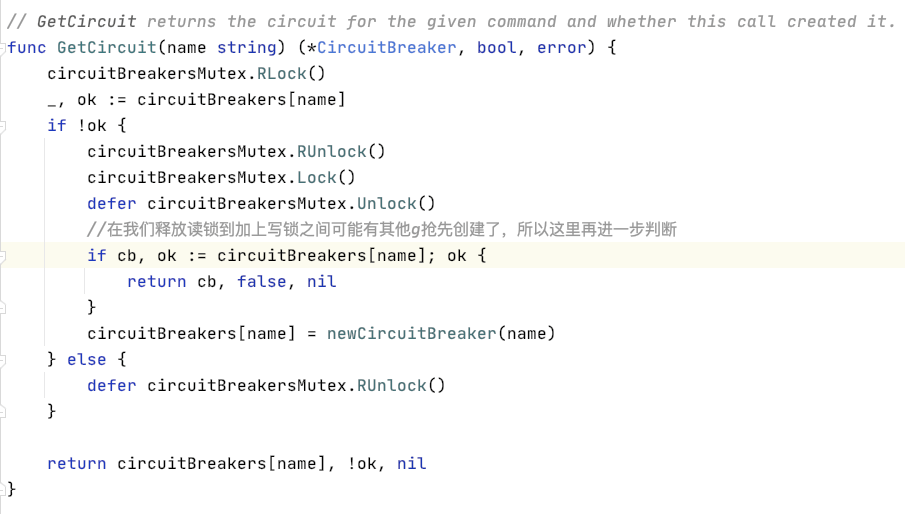
这个函数代码很清晰,如果没有从 circuitBreakers中查询到对应的 CircuitBreaker,那么就创建一个。
这里的代码有点小细节。首先 circuitBreakers是 map 类型,我们都知道 map 并不是并发安全的。所以在查找的的时候加了读锁。如果没找到值,那么解除读锁。尝试获取写锁,我们在写锁里面,又进一步确认是否存在circuitBreakers,为什么需要这样操作? 这是因为在我们释放读锁到获取写锁过程中有可能存在其他的 Goroutine 抢先一步创建。所以这里需要进一步确认,此时不存在,那就真的不存在,通过 name 生成一个 circuitBreakers。具体看下 newCircuitBreaker(name) 函数。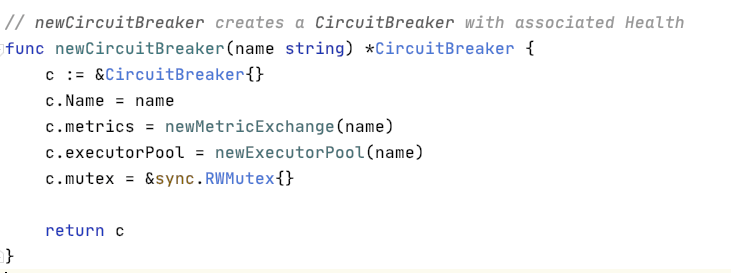
主要是初始化创建一个熔断器 CircuitBreaker操作,我们可以看看 CircuitBreaker 都有哪些字段。
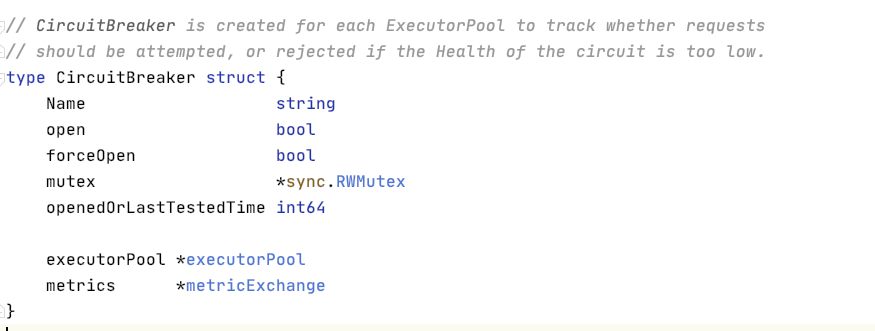
主要说明几个字段,open 表示当前熔断器是否开启,executorPool 是流量控制中心,所有的请求都需要先获取到令牌。metrics 的类型是 *metricExchange,可以看成是上报执行状态事件的载体。通过它把执行状态信息存储到实际熔断器执行各个维度状态(成功次数,失败次数,超时……)的数据集合中。
newCircuitBreaker(name) 初始化的同时也初始化了 executorPool 和 metrics。
先看 newMetricExchange(name)。看看它 metricExchange 结构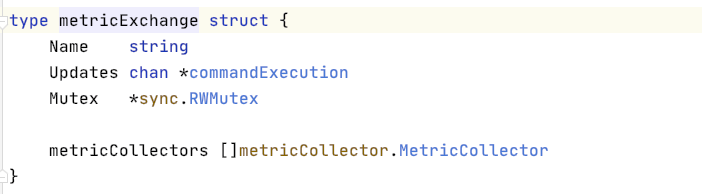
Updates 是一个 channel 类型,通过 Updates 上报执行事件集合。metricCollectors 存储的是 metricCollector.MetricCollector 切片,而 metricCollector.MetricCollector 是一个接口类型。

newMetricExchange(name) 中,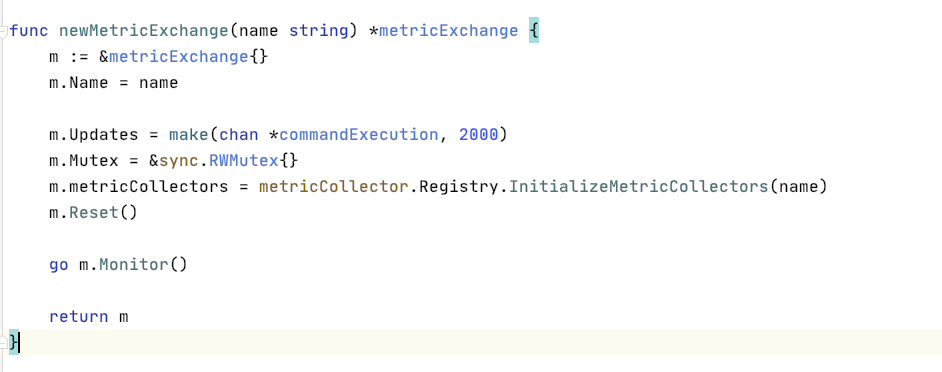
可以看到,初始化 Updates 通道的的容量是 2000。初始化 metricCollectors 主要逻辑在 InitializeMetricCollectors。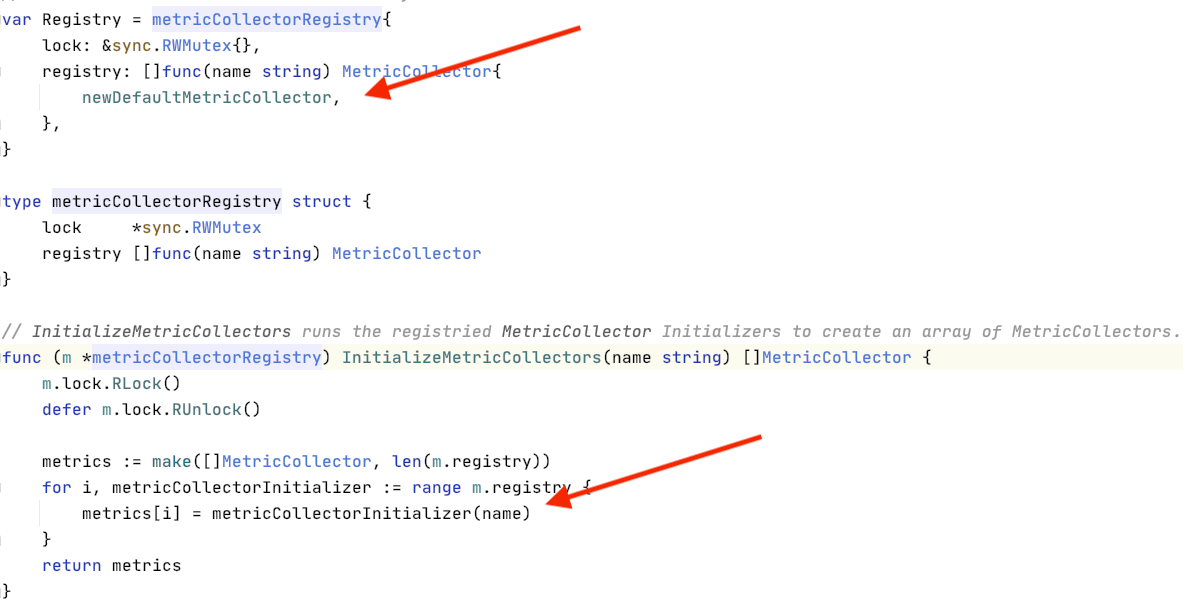
关键的地方我标明了。再看看 newDefaultMetricCollector
此函数返回一个 MetricCollector 类型,结构体 DefaultMetricCollector 实现了 MetricCollector 所有方法。再看看 DefaultMetricCollector,不正是存储熔断器执行状态所有信息嘛。看看指针类型 rolling.Number: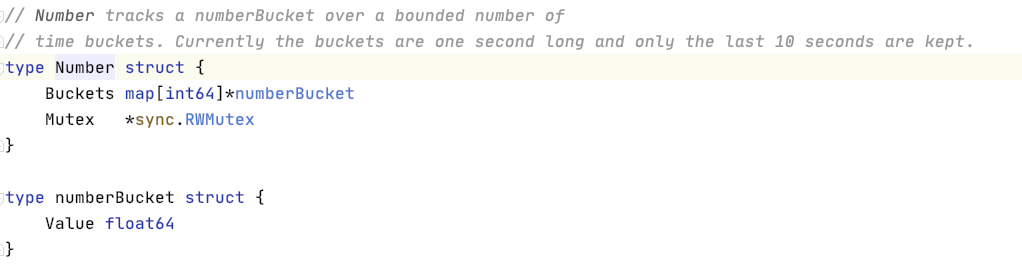
rolling.Number 是真正存储各个执行事件状态信息的底层存储结构。它是如何只保存 10 秒内的信息的。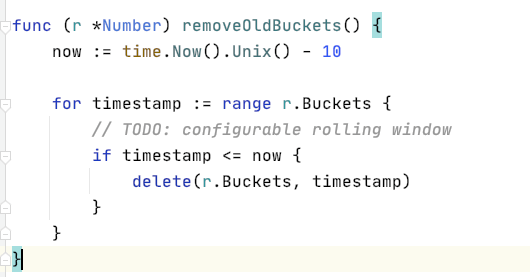
惊不惊喜?newMetricExchange(name) 还有一个细节,会单独开启一个 g 运行 go m.Monitor() 去接收 channel 类型的 Updates 信息,即执行事件状态信息。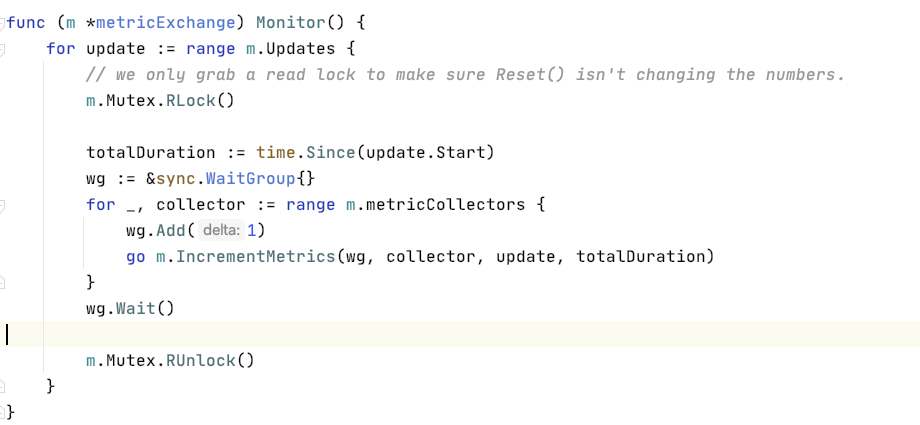
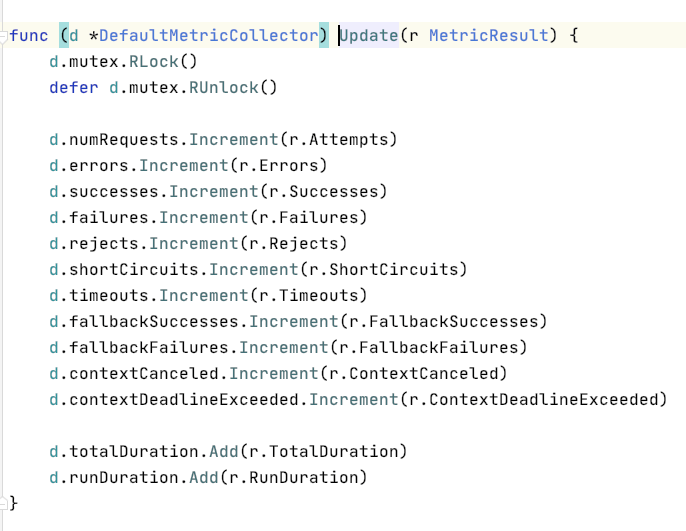
在接收到事件信息后,调用 IncrementMetrics 先做状态信息的整合,最终把整合后的执行状态事件信息上报 collector.Update(r)。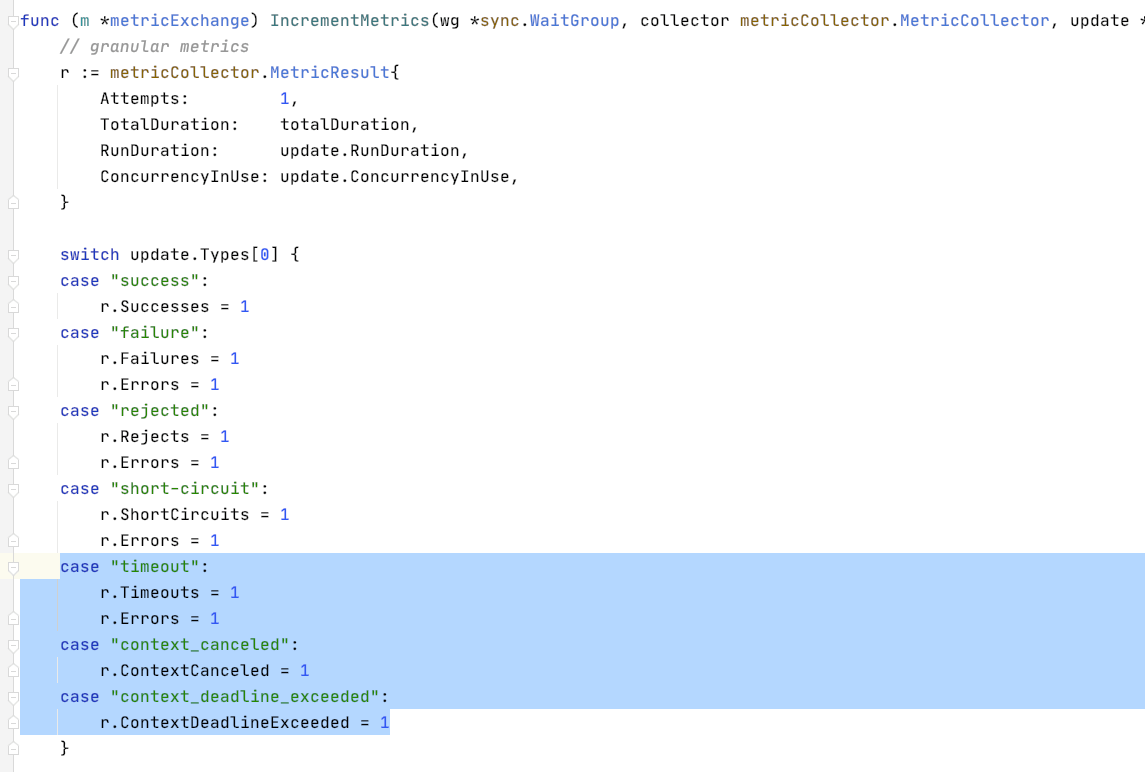
接着回头看初始化流量控制中心 newExecutorPool(name)。先看看 executorPool结构。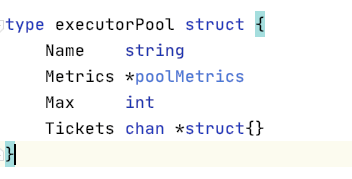
主要关注两个字段,Tickets表示的就是访问令牌带缓冲通道的 channel ,初始化 channel 容量取决于一开始你设置的MaxConcurrentRequests。当有请求到来时,从 channel 中拿出一个令牌,调用后重新归还。 poolMetrics 就是流量控制的具体指标。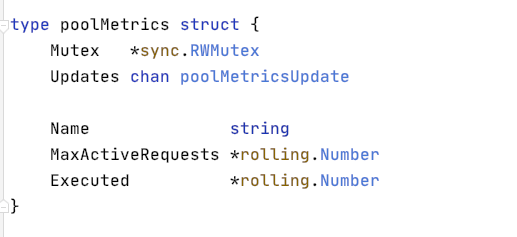
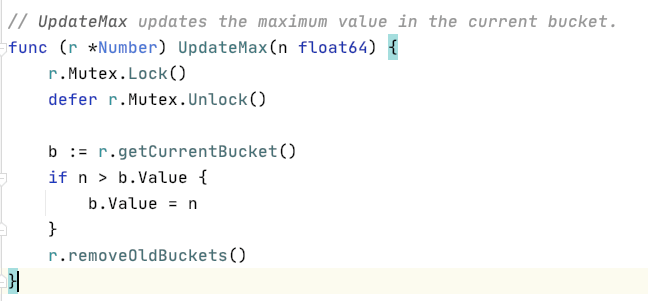
Executed表示当前桶已经处理的请求数量。此外在 newExecutorPool(name) 函数中,和刚才套路一样,启动一个 go m.Monitor() 专门去更新当前桶的最大值。
到这里,GetCircuit(name) 获取一个熔断器的代码讲完了。
回到 GoC ,我们得到一个 circuitBreakers 的指针。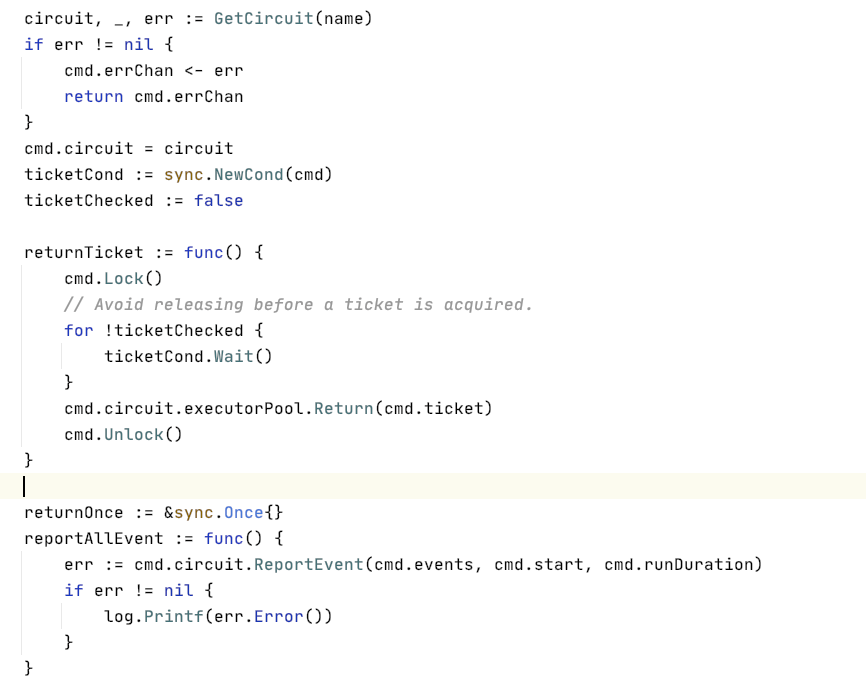
接下来我们创建一个条件变量 sync.NewCond。条件变量的场景是当共享资源发生变化时,通知那些被互斥锁锁住的线程。
在这里它是用来协调通知你可以归还访问令牌了。
接着有一句 returnOnce := &sync.Once{},关于 sync.Once,之前解析过一篇文章你真的了解 sync.Once 吗。这里它存在的意义是什么? 我们往下看,就会发现其实到后面开启了两个 Goroutine。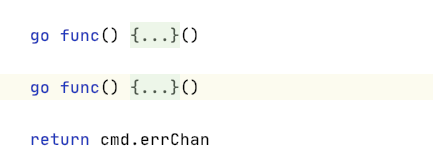
它的作用是确保由最快那个 Goroutine 运行 errWithFallback() 和 reportAllEvent(),而且保证只会执行一次。
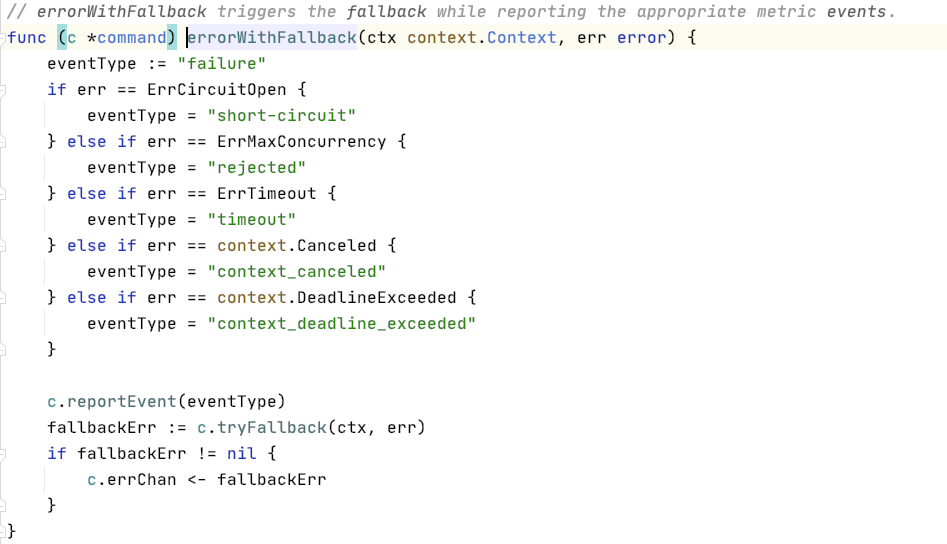
接着往下看,
这个函数就是就是用来上报执行事件的。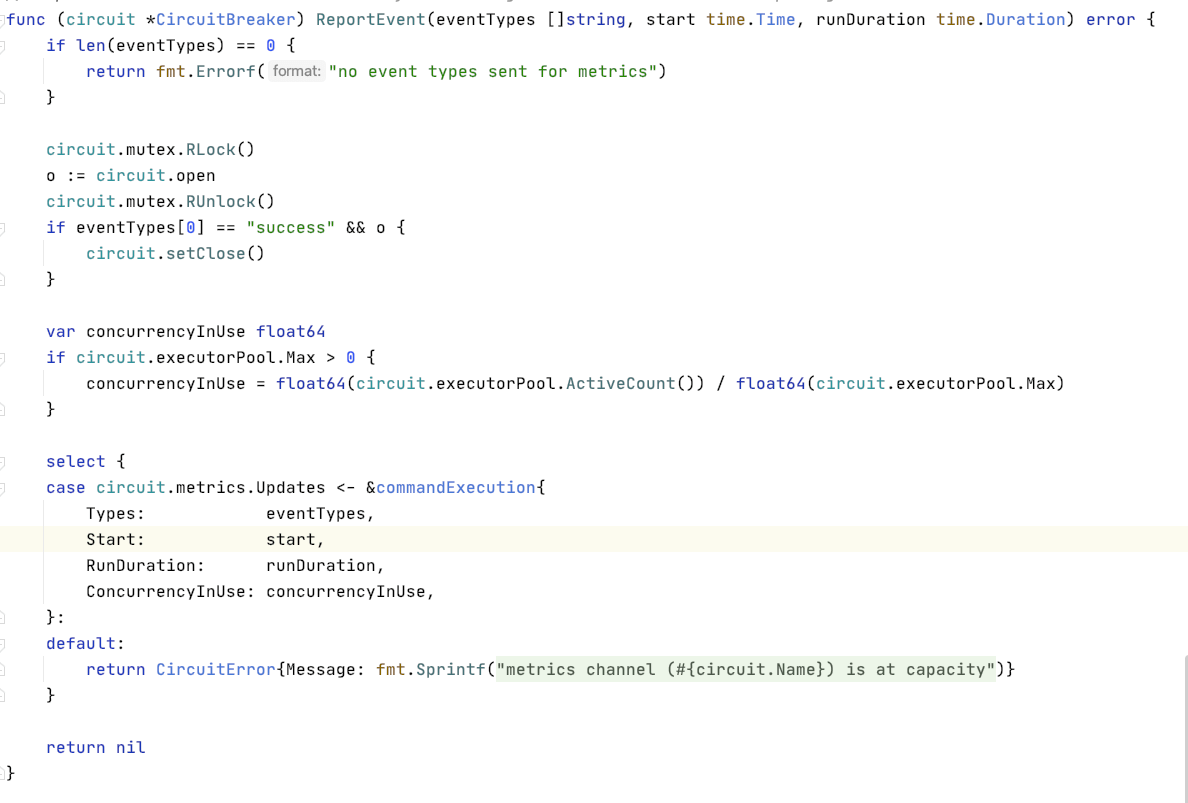
前面都好懂,我们从这段开始看:
这里操作这句话是什么意思?因为存在一种情况:当前熔断器是开启的,并且已经过了 SleepWindow 时间,此时请求就属于半开的状态,允许尝试执行,如果执行成功,那么就说明服务恢复了,可以关闭熔断器了。接下来,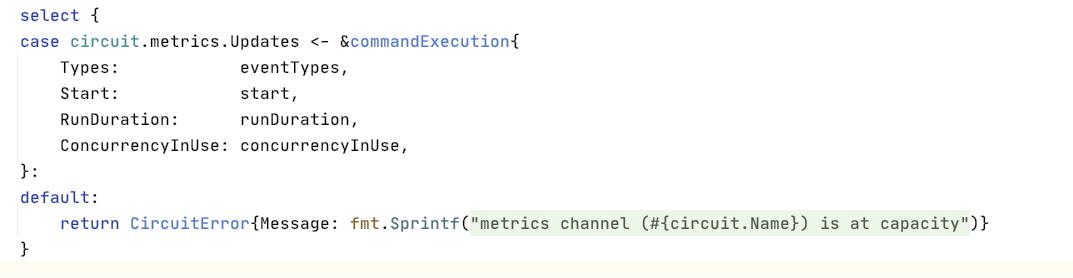
组装执行状态状态事件,然后塞进 Updates 通道中。正好被初始化 metricExchange 另开的 Goroutine 接收,这样,这个上报流程就对应上了。
接下来就是刚才截图的两个 Goroutine,我们先看第一个。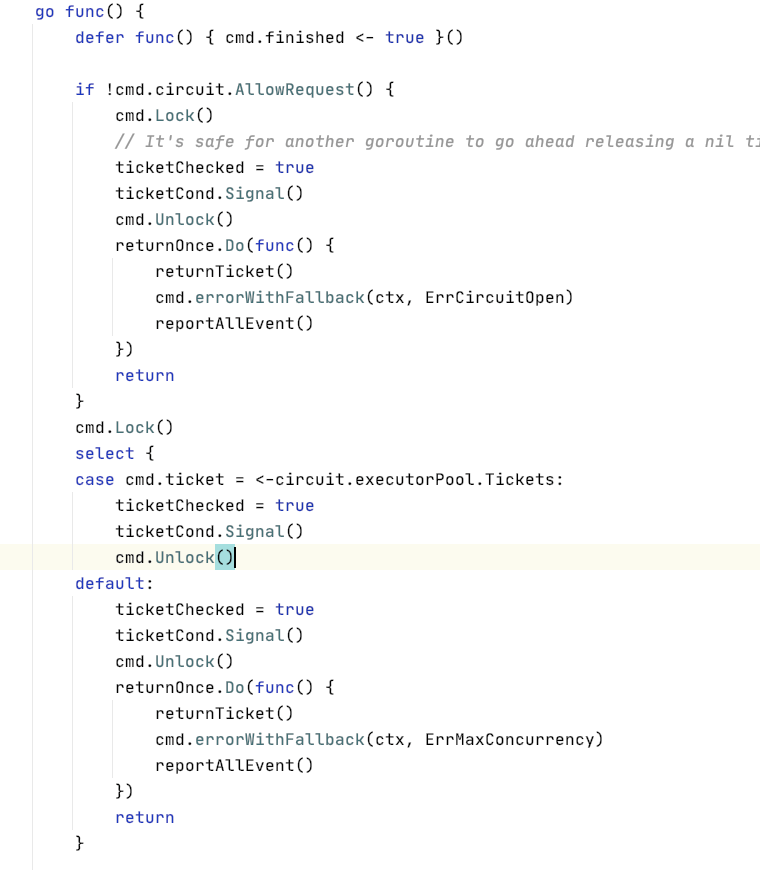
截图了上前半部分。上来一个 defer func() { cmd.finished <- true }() 作为正常运行结束的通知。然后就是 cmd.circuit.AllowRequest()判断是否能请求。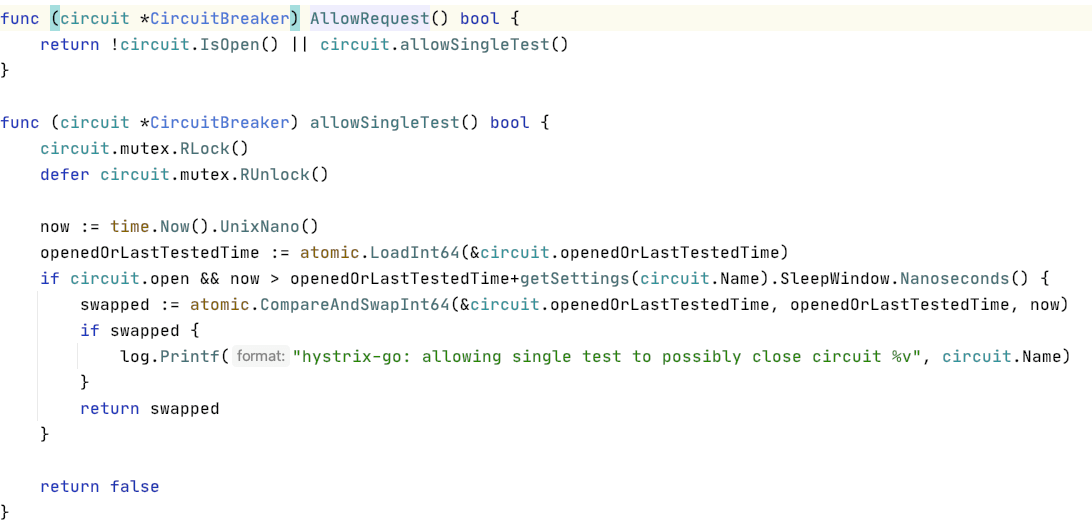
有两种情况可以往下走,第一种熔断器是关闭的。对应 circuit.IsOpen()。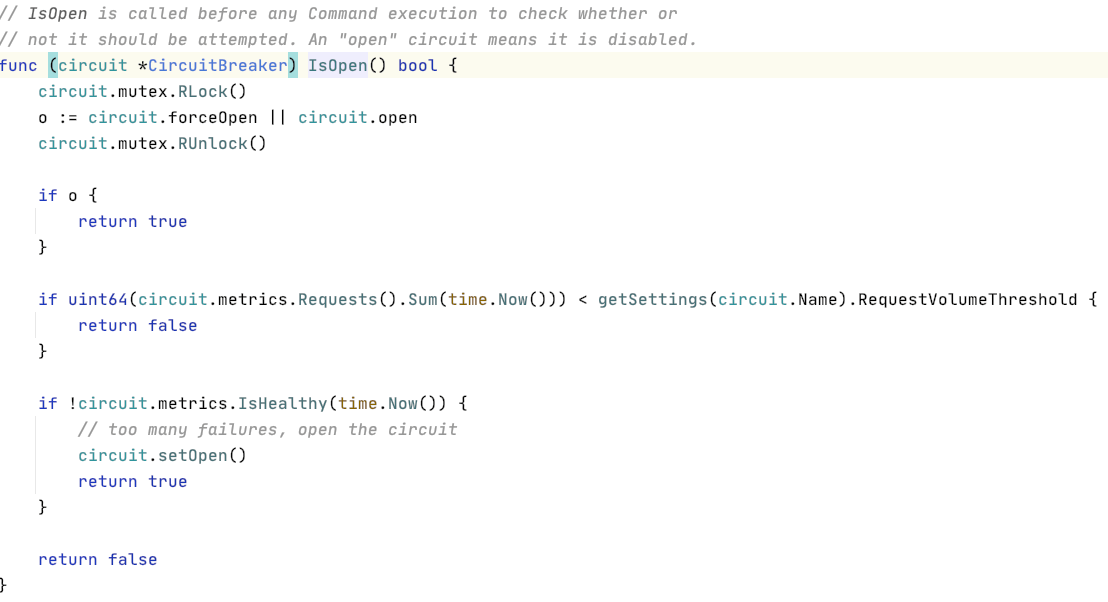
首先判断熔断器是否被强制开启或者已经开启,如果是,直接返回 true。否则说明是当前熔断器处于关闭。接着判断过去十秒内各个桶值的和是否小于设置的 RequestVolumeThreshold值,如果小于,说明熔断器还应该是关闭状态,返回 false 。如果大于等于,那么应该进一步去判断错误百分比 是否超出自己的设置的ErrorPercentThreshold。如果超出了,那么说明错误率过高,此时需要开启熔断器。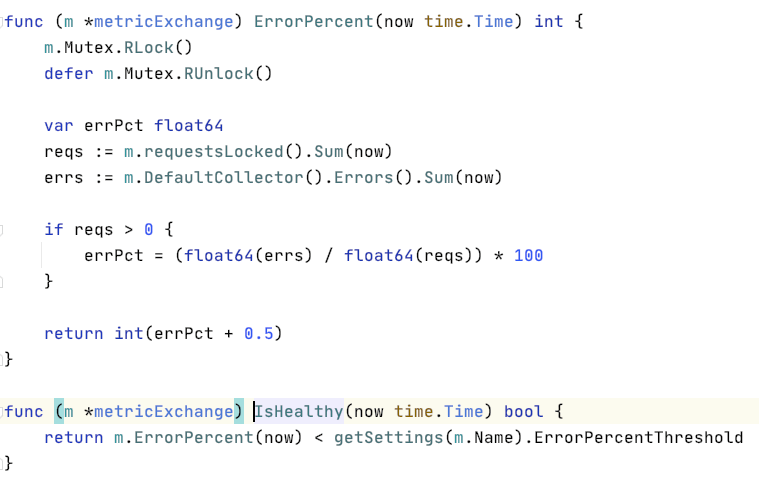
这段代码很好懂,有意思的是 int(errPct + 0.5)。+0.5 是为了四舍五入,如果直接浮点数转换成整形,那么必然就是去除小数点。加了 0.5,那么假设 ErrorPercentThreshold设置 50,如果是 <45.5,熔断器就继续关闭,否则开启熔断器。
如果circuit.IsOpen()不符合,那么再看 circuit.allowSingleTest()。虽然熔断器是开启的,但是如果当前的时间已经大于 (上次开启熔断器的时间+SleepWindow 的时间),这时候熔断器属于半开的状态,可以执行下一步。那么就会返回 true。
如果 cmd.circuit.AllowRequest 返回 false,那么就是执行 returnTicket 归还令牌(尽管这时候还没有令牌可言)。这段代码很有趣,通过变量 ticketChecked 加 sync.NewCond 实现的逻辑。cmd.errorWithFallback(),上报熔断器已开启事件(circuit open)以及运行 fallBakck 保底函数(如果存在的话),执行结束,响应。
如果返回 true,接着玩下走,
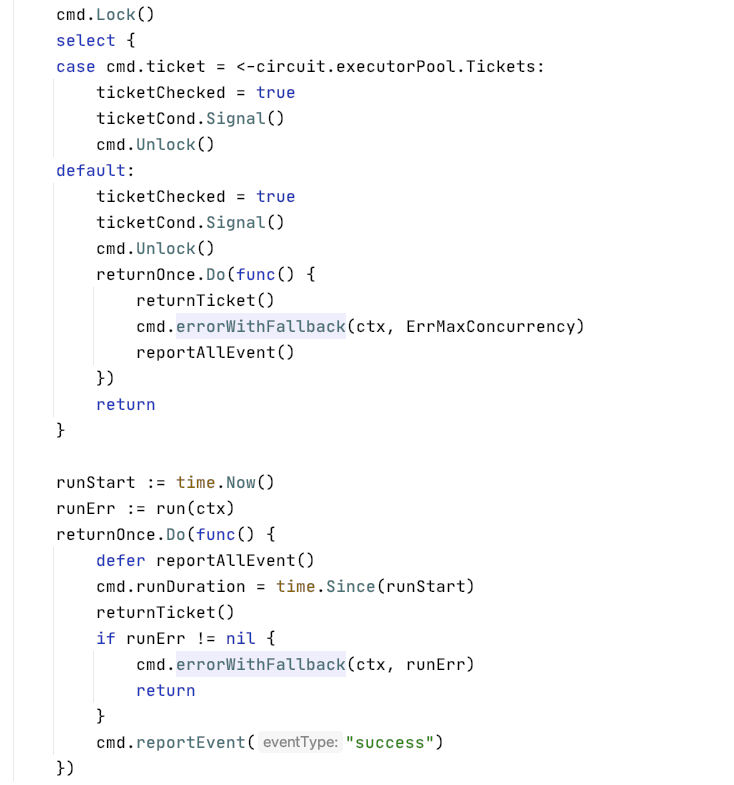
如果拿不到访问令牌,那么和刚才一样,上报当前请求已超过并发数事件(max concurrency),运行保底操作,响应。
如果拿到访问令牌,那么真正执行自己的业务代码 run(ctx)。套路和上面相似。
再看第二个 Goroutine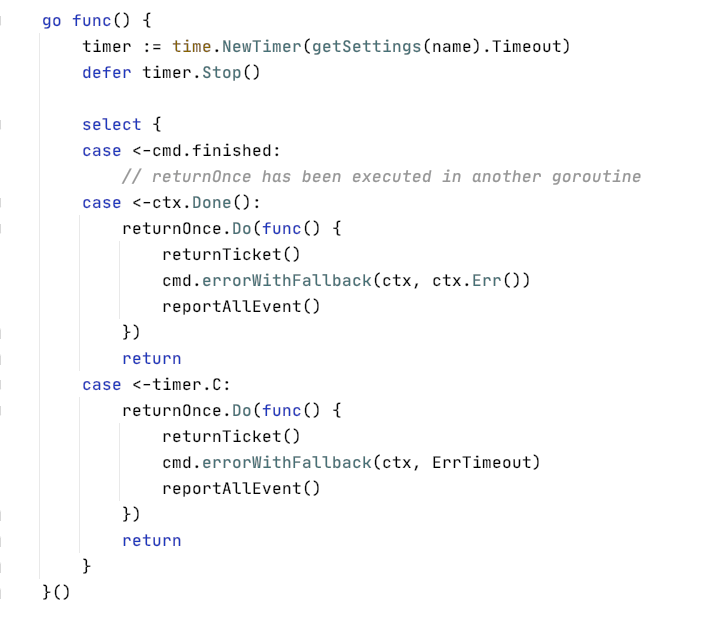
三个 case分别表示:正常执行结束、业务执行被取消以及超时。至于为什么说 Do是同步操作,因为在 Doc 最后,
 ,而
,而 Go 则是一个异步过程。
到这里,从 Do 开始执行的大体流程就走完了。
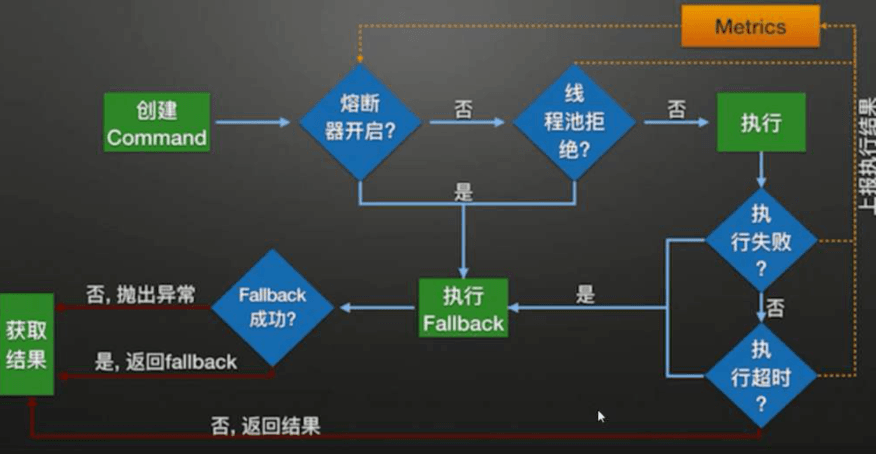
最后我们可以直接给出它的大体流程图。
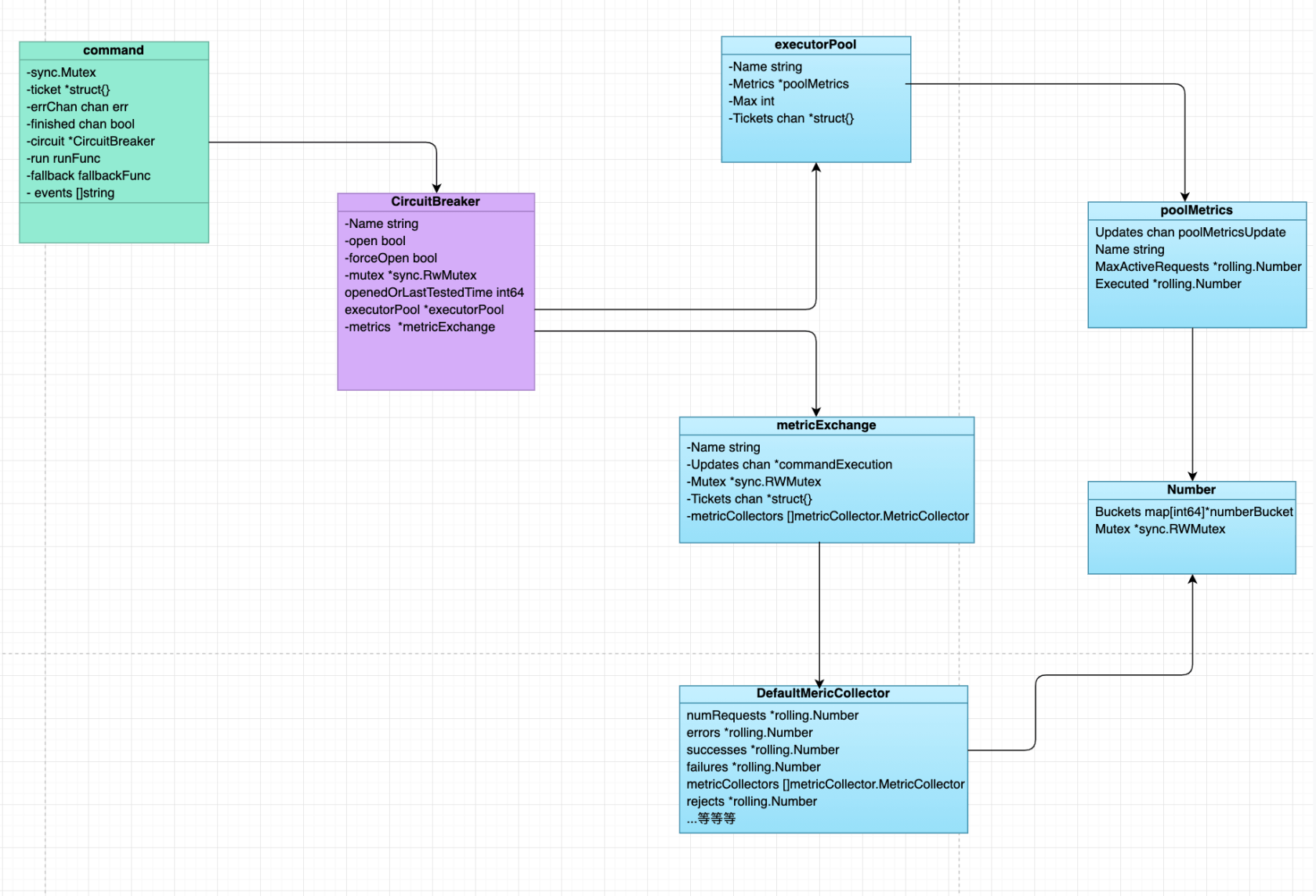
他们结构体之间的一些关系图。
分享 一些奇奇怪怪的东西

👆 长按关注库里的深夜食堂
本作品采用《CC 协议》,转载必须注明作者和本文链接







 关于 LearnKu
关于 LearnKu




推荐文章: