
 architect director
architect director二进制算法
加法
减法
乘法
乘数只能是 0 或者 1,所以实际的乘法,就退化成了位移和加法。
对应到我们之前讲的数字电路和 ALU,你可以看到,最后一步的加法,我们可以用上一讲的加法器来实现。乘法因为只有“0”和“1”两种情况,所以可以做成输入输出都是 4 个开关,中间用 1 个开关,同时来控制这 8 个开关的方式,这就实现了二进制下的单位的乘法。
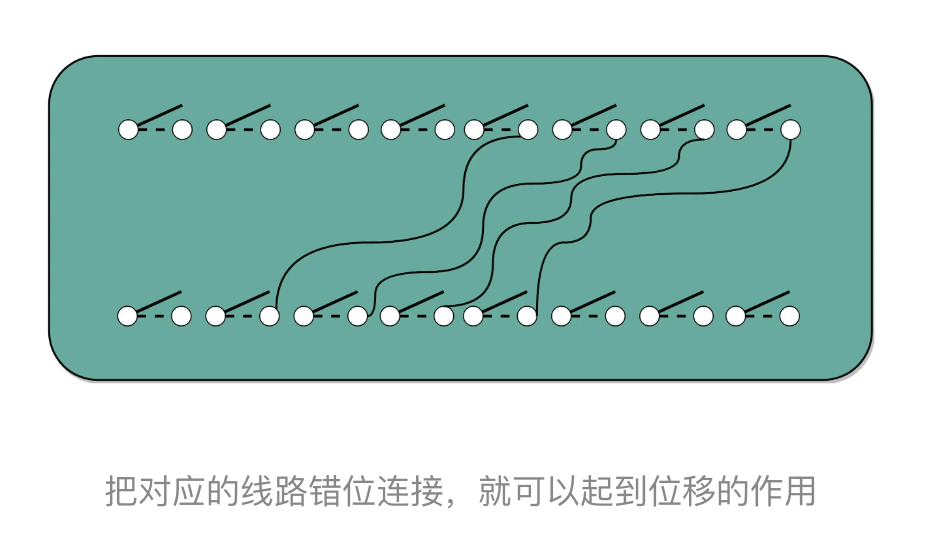
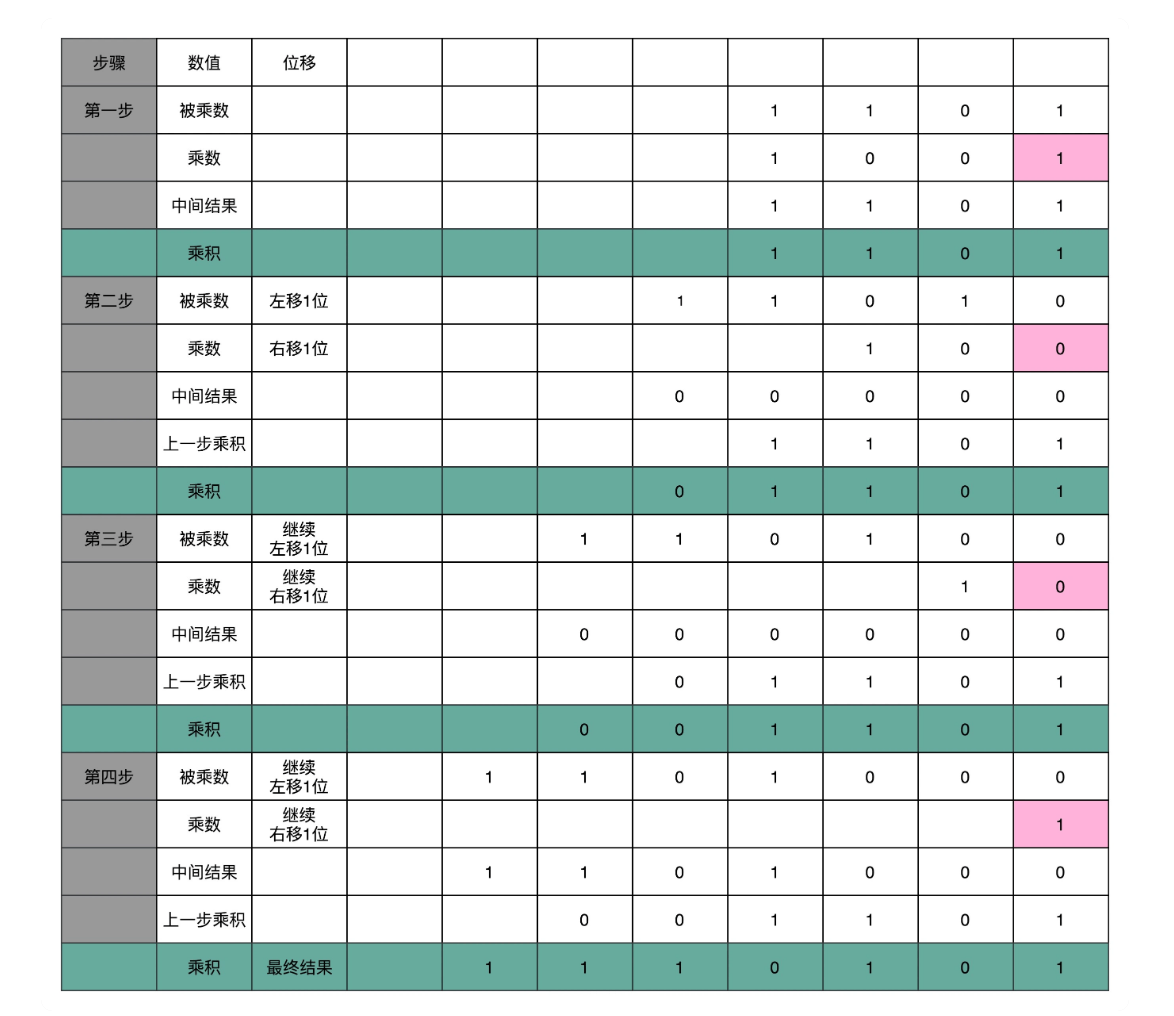
我们先拿乘数最右侧的个位乘以被乘数,然后把结果写入用来存放计算结果的开关里面,然后,把被乘数左移一位,把乘数右移一位,仍然用乘数去乘以被乘数,然后把结果加到刚才的结果上。反复重复这一步骤,直到不能再左移和右移位置。这样,乘数和被乘数就像两列相向而驶的列车,仅仅需要简单的加法器、一个可以左移一位的电路和一个右移一位的电路,就能完成整个乘法。
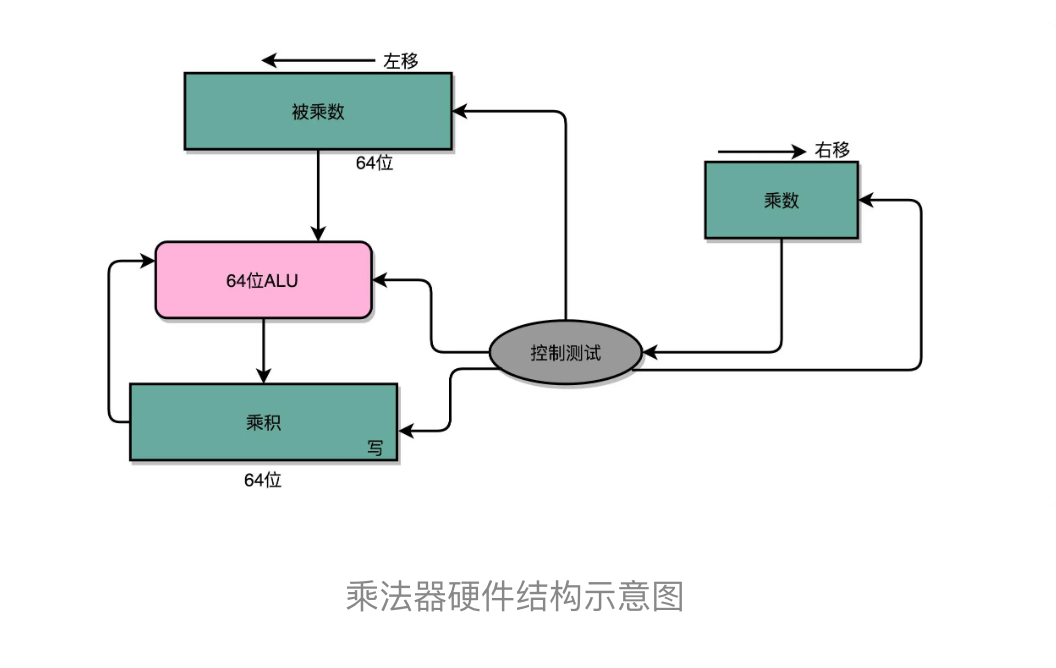
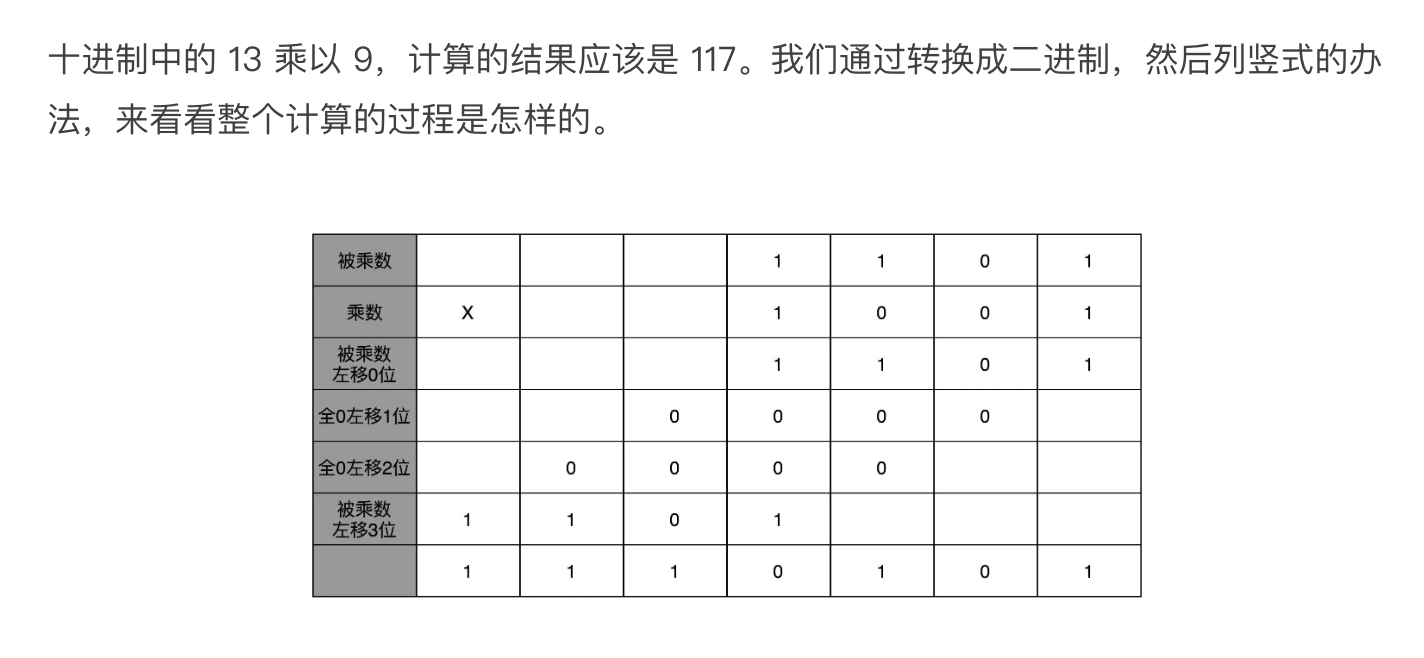
你看这里画的乘法器硬件结构示意图。这里的控制测试,其实就是通过一个时钟信号,来控制左移、右移以及重新计算乘法和加法的时机。我们还是以计算 13×9,也就是二进制的 1101×1001 来具体看。
这个计算方式虽然节约电路了,但是也有一个很大的缺点,那就是慢。
你应该很容易就能发现,在这个乘法器的实现过程里,我们其实就是把乘法展开,变成了“加法 + 位移”来实现。我们用的是 4 位数,所以要进行 4 组“位移 + 加法”的操作。而且这 4 组操作还不能同时进行。因为下一组的加法要依赖上一组的加法后的计算结果,下一组的位移也要依赖上一组的位移的结果。这样,整个算法是“顺序”的,每一组加法或者位移的运算都需要一定的时间。
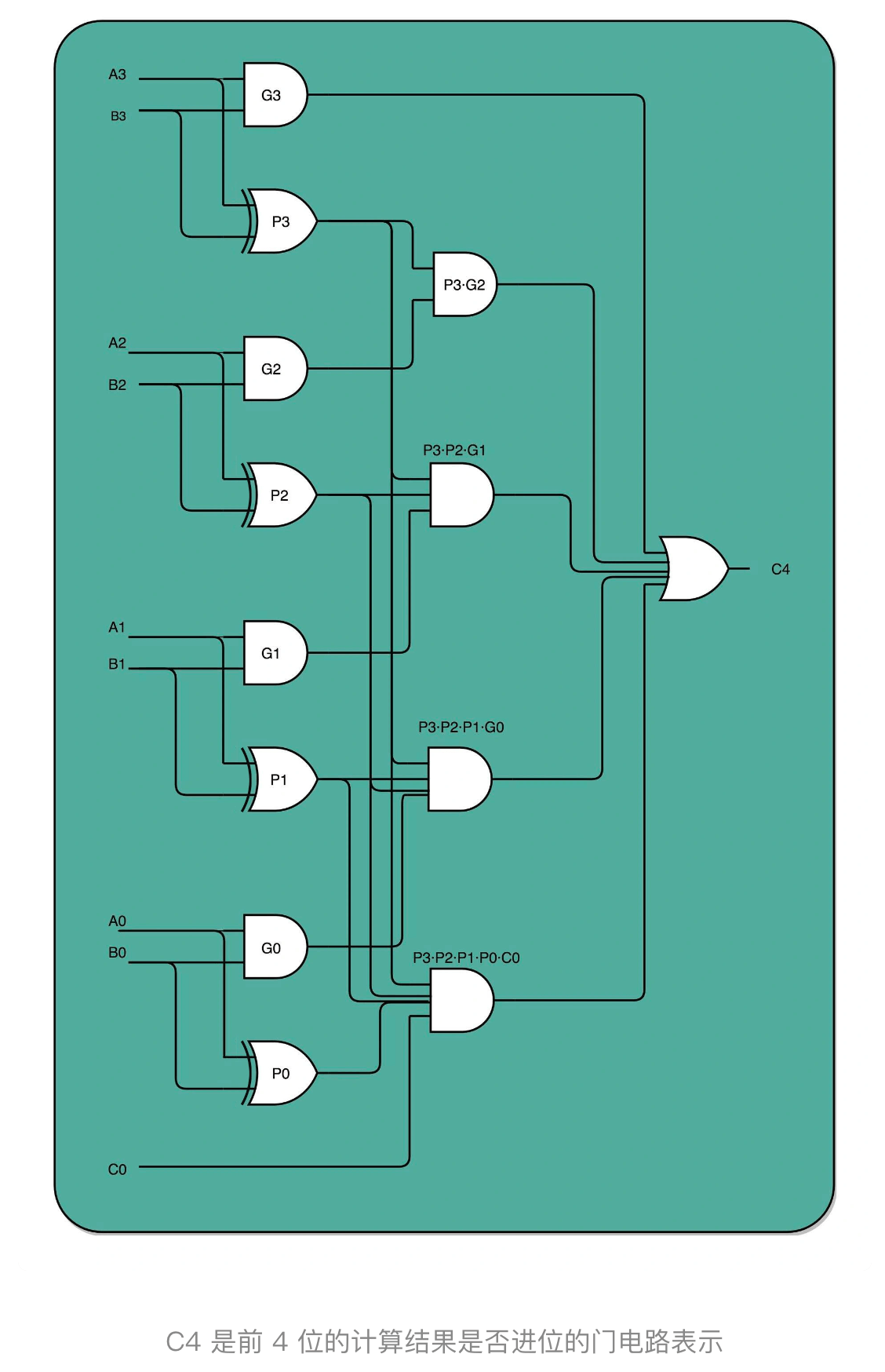
并行计算

电路并行
除法
浮点数
实际数学中我们表示一个很大的数,会用科学计数法。如 10^8次方。计算机中也是同理。
有一个 IEEE 的标准,它定义了两个基本的格式。一个是用 32 比特表示单精度的浮点数,也就是我们常常说的 float 或者 float32 类型。另外一个是用 64 比特表示双精度的浮点数,也就是我们平时说的 double 或者 float64 类型。
双精度类型和单精度类型差不多,这里,我们来看单精度类型,双精度你自然也就明白了。
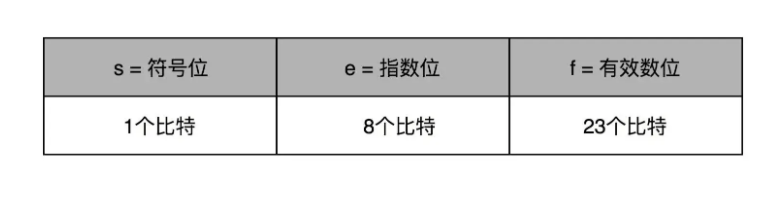
表达式:(−1)s×1.f×2e
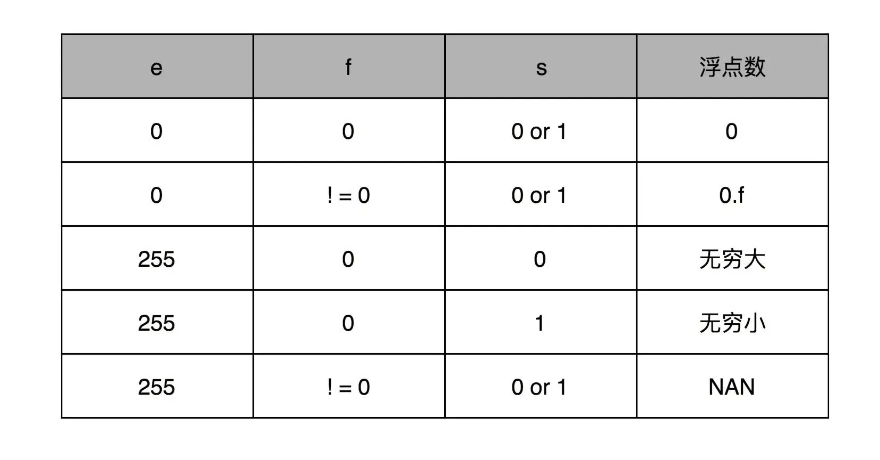
为什么我们用 0.3 + 0.6 不能得到 0.9 呢?这是因为,浮点数没有办法精确表示 0.3、0.6 和 0.9。事实上,我们拿出 0.1~0.9 这 9 个数,其中只有 0.5 能够被精确地表示成二进制的浮点数,也就是 s = 0、e = -1、f = 0 这样的情况。而 0.3、0.6 乃至我们希望的 0.9,都只是一个近似的表达。这个也为我们带来了一个挑战,就是浮点数无论是表示还是计算其实都是近似计算。那么,在使用过程中,我们该怎么来使用浮点数,以及使用浮点数会遇到些什么问题呢?
浮点数有精度缺失,怎么办呢?
Kahan Summation 算法
public class KahanSummation {
public static void main(String[] args) {
float sum = 0.0f;
float c = 0.0f;
for (int i = 0; i < 20000000; i++) {
float x = 1.0f;
float y = x - c;
float t = sum + y;
c = (t-sum)-y;
sum = t;
}
System.out.println("sum is " + sum);
}
}其实这个算法的原理其实并不复杂,就是在每次的计算过程中,都用一次减法,把当前加法计算中损失的精度记录下来,然后在后面的循环中,把这个精度损失放在要加的小数上,再做一次运算。






 关于 LearnKu
关于 LearnKu



