
 architect director
architect directorKafka控制器
控制器是如何选举出来的?
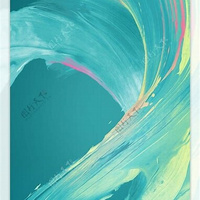
Broker 在启动时,会尝试去 ZooKeeper 中创建 /controller 节点。Kafka 当前选举控制器的规则是:第一个成功创建 /controller 节点的 Broker 会被指定为控制器。
控制器是做什么的?
1.主题管理(创建、删除、增加分区)
执行kafka-topics脚本时,大部分的工作都是控制器完成的。
2.分区重分配
kafka-reassign-partitions 脚本提供的对已有主题分区进行细粒度的分配功能。这部分功能也是控制器实现的
3.Preferred 领导者选举
Preferred 领导者选举主要是 Kafka 为了避免部分 Broker 负载过重而提供的一种换 Leader 的方案。
4.集群成员管理(新增 Broker、Broker 主动关闭、Broker 宕机)
自动检测新增 Broker、Broker 主动关闭及被动宕机。这种自动检测是依赖于前面提到的 Watch 功能和 ZooKeeper 临时节点组合实现的
比如,控制器组件会利用 Watch 机制检查 ZooKeeper 的 /brokers/ids 节点下的子节点数量变更。目前,当有新 Broker 启动后,它会在 /brokers 下创建专属的 znode 节点。一旦创建完毕,ZooKeeper 会通过 Watch 机制将消息通知推送给控制器,这样,控制器就能自动地感知到这个变化,进而开启后续的新增 Broker 作业。
侦测 Broker 存活性则是依赖于刚刚提到的另一个机制:临时节点。每个 Broker 启动后,会在 /brokers/ids 下创建一个临时 znode。当 Broker 宕机或主动关闭后,该 Broker 与 ZooKeeper 的会话结束,这个 znode 会被自动删除。同理,ZooKeeper 的 Watch 机制将这一变更推送给控制器,这样控制器就能知道有 Broker 关闭或宕机了,从而进行“善后”。
5.数据服务
控制器的最后一大类工作,就是向其他 Broker 提供数据服务。控制器上保存了最全的集群元数据信息,其他所有 Broker 会定期接收控制器发来的元数据更新请求,从而更新其内存中的缓存数据。
控制器保存的数据
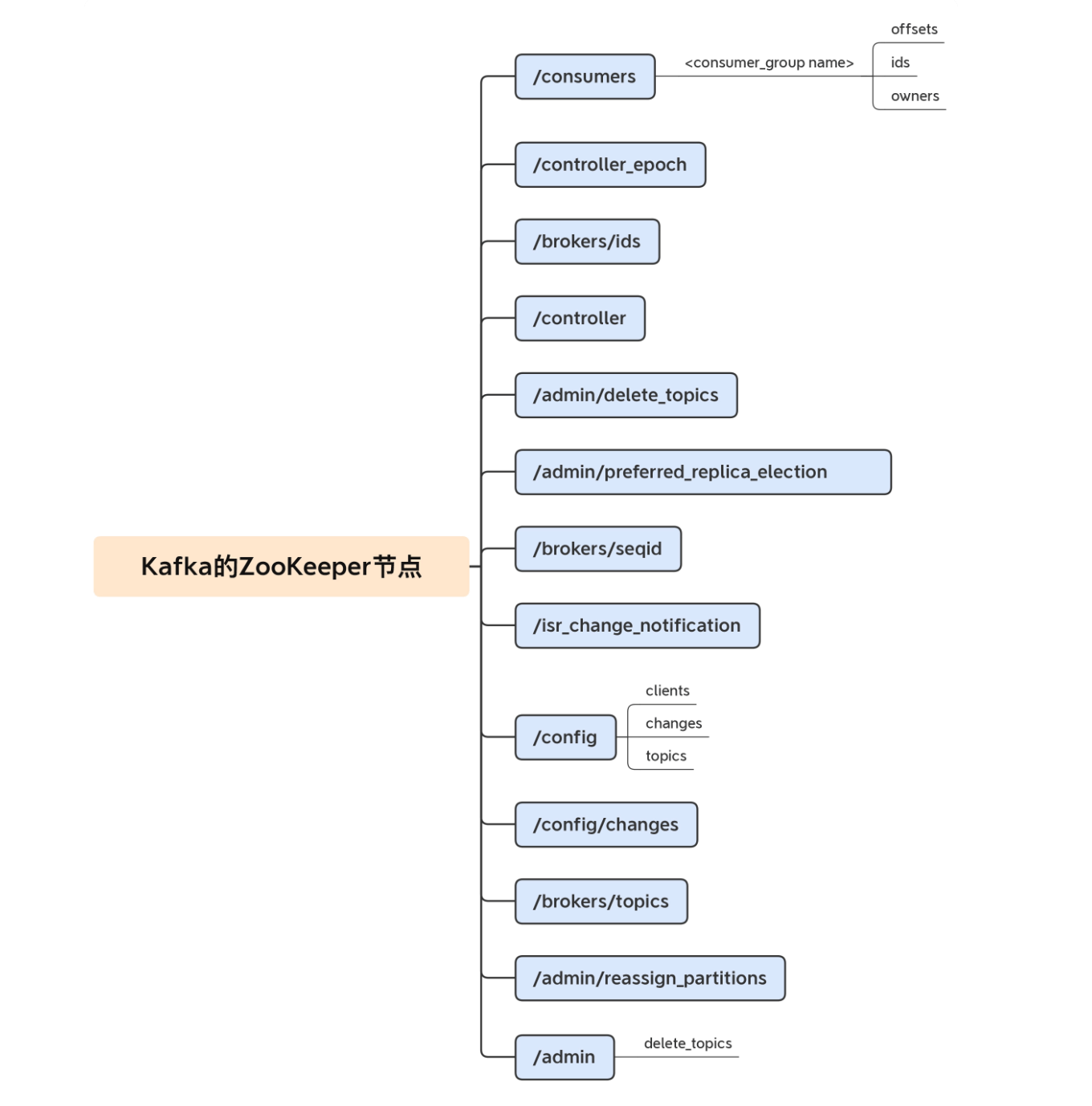
这里面比较重要的数据有:
所有主题信息。包括具体的分区信息,比如领导者副本是谁,ISR 集合中有哪些副本等。
所有 Broker 信息。包括当前都有哪些运行中的 Broker,哪些正在关闭中的 Broker 等。
所有涉及运维任务的分区。包括当前正在进行 Preferred 领导者选举以及分区重分配的分区列表。
值得注意的是,这些数据其实在 ZooKeeper 中也保存了一份。每当控制器初始化时,它都会从 ZooKeeper 上读取对应的元数据并填充到自己的缓存中。有了这些数据,控制器就能对外提供数据服务了。这里的对外主要是指对其他 Broker 而言,控制器通过向这些 Broker 发送请求的方式将这些数据同步到其他 Broker 上。
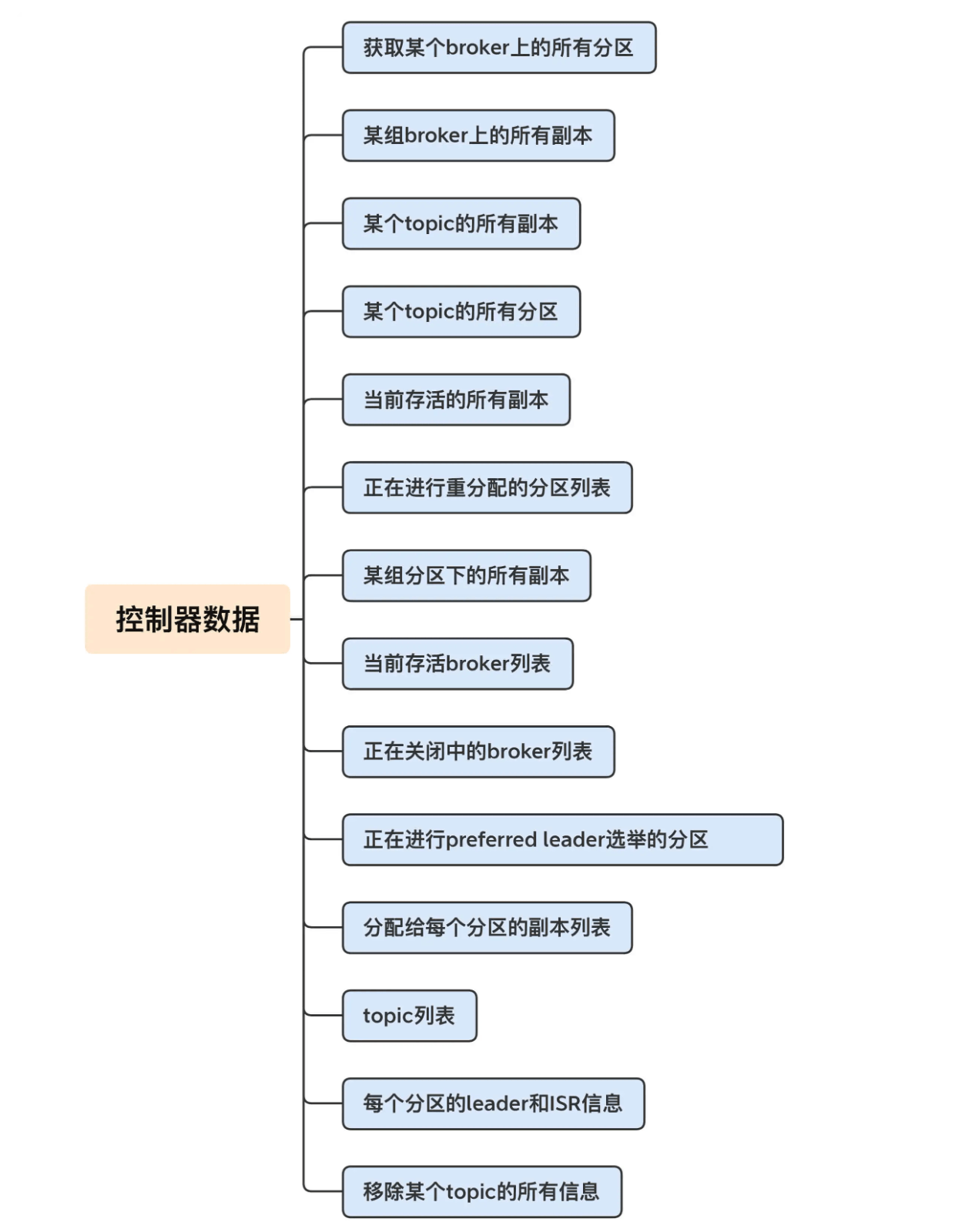
控制器故障转移(Failover)
故障转移指的是,当运行中的控制器突然宕机或意外终止时,Kafka 能够快速地感知到,并立即启用备用控制器来代替之前失败的控制器。这个过程就被称为 Failover,该过程是自动完成的,无需你手动干预。
控制器内部设计原理
在 Kafka 0.11 版本之前,控制器的设计是相当繁琐的,代码更是有些混乱,这就导致社区中很多控制器方面的 Bug 都无法修复。控制器是多线程的设计,会在内部创建很多个线程。比如,控制器需要为每个 Broker 都创建一个对应的 Socket 连接,然后再创建一个专属的线程,用于向这些 Broker 发送特定请求。如果集群中的 Broker 数量很多,那么控制器端需要创建的线程就会很多。另外,控制器连接 ZooKeeper 的会话,也会创建单独的线程来处理 Watch 机制的通知回调。除了以上这些线程,控制器还会为主题删除创建额外的 I/O 线程。比起多线程的设计,更糟糕的是,这些线程还会访问共享的控制器缓存数据。我们都知道,多线程访问共享可变数据是维持线程安全最大的难题。为了保护数据安全性,控制器不得不在代码中大量使用 ReentrantLock 同步机制,这就进一步拖慢了整个控制器的处理速度。鉴于这些原因,社区于 0.11 版本重构了控制器的底层设计,最大的改进就是,把多线程的方案改成了单线程加事件队列的方案。我直接使用社区的一张图来说明。
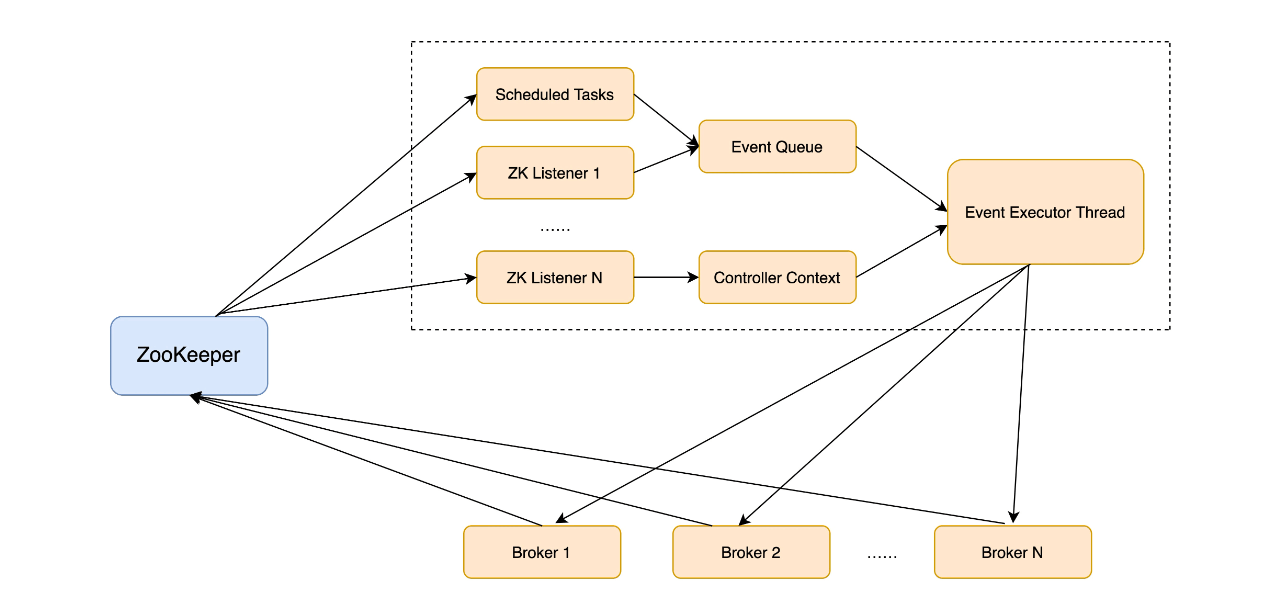
从这张图中,我们可以看到,社区引入了一个事件处理线程,统一处理各种控制器事件,然后控制器将原来执行的操作全部建模成一个个独立的事件,发送到专属的事件队列中,供此线程消费。这就是所谓的单线程 + 队列的实现方式。值得注意的是,这里的单线程不代表之前提到的所有线程都被“干掉”了,控制器只是把缓存状态变更方面的工作委托给了这个线程而已。这个方案的最大好处在于,控制器缓存中保存的状态只被一个线程处理,因此不再需要重量级的线程同步机制来维护线程安全,Kafka 不用再担心多线程并发访问的问题,非常利于社区定位和诊断控制器的各种问题。
事实上,自 0.11 版本重构控制器代码后,社区关于控制器方面的 Bug 明显少多了,这也说明了这种方案是有效的。针对控制器的第二个改进就是,将之前同步操作 ZooKeeper 全部改为异步操作。ZooKeeper 本身的 API 提供了同步写和异步写两种方式。之前控制器操作 ZooKeeper 使用的是同步的 API,性能很差,集中表现为,当有大量主题分区发生变更时,ZooKeeper 容易成为系统的瓶颈。新版本 Kafka 修改了这部分设计,完全摒弃了之前的同步 API 调用,转而采用异步 API 写入 ZooKeeper,性能有了很大的提升。根据社区的测试,改成异步之后,ZooKeeper 写入提升了 10 倍!
除了以上这些,社区最近又发布了一个重大的改进!之前 Broker 对接收的所有请求都是一视同仁的,不会区别对待。这种设计对于控制器发送的请求非常不公平,因为这类请求应该有更高的优先级。举个简单的例子,假设我们删除了某个主题,那么控制器就会给该主题所有副本所在的 Broker 发送一个名为 StopReplica 的请求。如果此时 Broker 上存有大量积压的 Produce 请求,那么这个 StopReplica 请求只能排队等。如果这些 Produce 请求就是要向该主题发送消息的话,这就显得很讽刺了:主题都要被删除了,处理这些 Produce 请求还有意义吗?此时最合理的处理顺序应该是,赋予 StopReplica 请求更高的优先级,使它能够得到抢占式的处理。这在 2.2 版本之前是做不到的。不过自 2.2 开始,Kafka 正式支持这种不同优先级请求的处理。简单来说,Kafka 将控制器发送的请求与普通数据类请求分开,实现了控制器请求单独处理的逻辑。鉴于这个改进还是很新的功能,具体的效果我们就拭目以待吧。
总结来说
- 之前的控制器使用多线程的方式处理,并且访问共享空间从而不得不加锁控制。这也导致很多BUG无法解决。
- 改进后使用单线程+事件处理方式,从而避免加锁控制访问共享空间。这一点可以多借鉴,因为很多优化方案都可以这么做。
- 请求分类处理:除了用优先级的方式处理请求之外,请求分类也是很好的方案。这些思想都是值得借鉴的。
当然,很多设计都是一步步优化而得来的,并不是一开始就设计好的。这也可以给我们开发带来启发。一开始就设计高楼大厦显然是比较费时费力的,但是随着迭代将平房改成高楼大厦的模式却屡见不鲜。Kafka也是一直在进步!






 关于 LearnKu
关于 LearnKu



