
 Go 小白理念
Go 小白理念6.1_1_图
6.1_1_图的基本概念
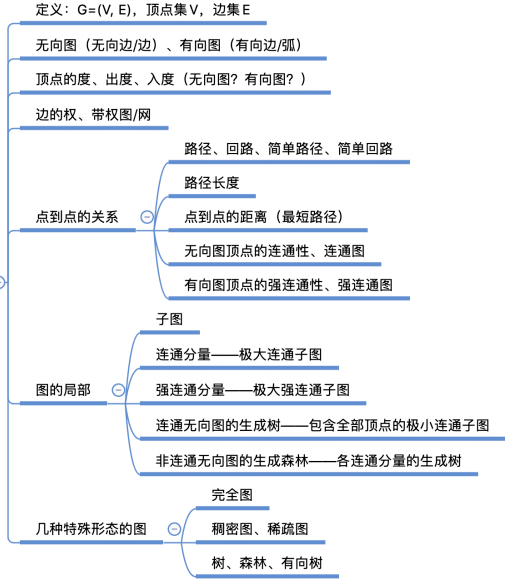
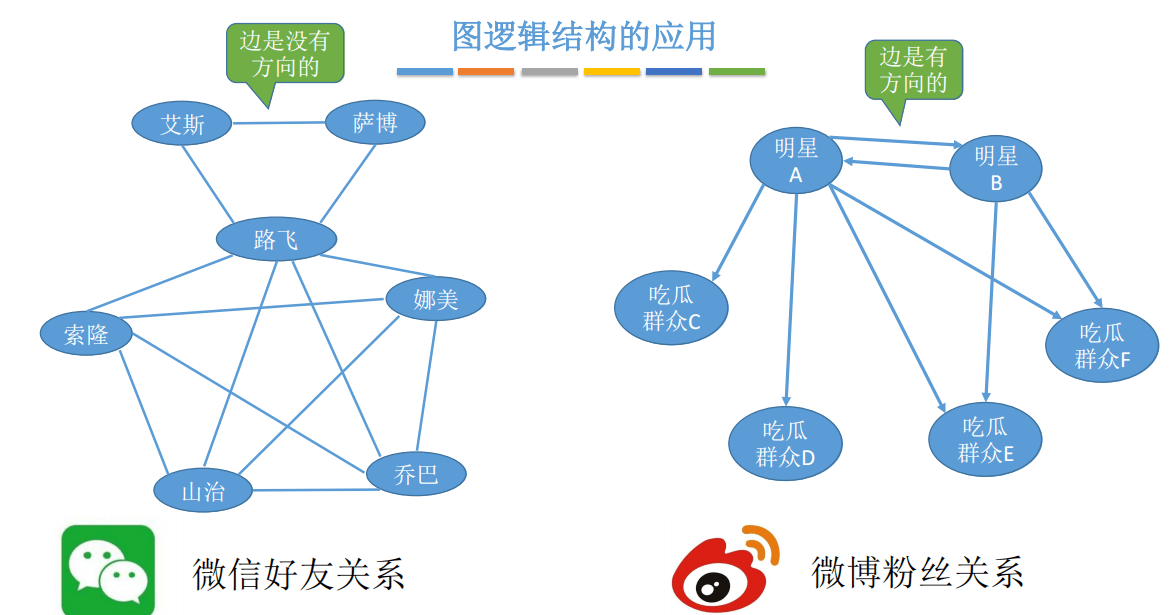
图
应用场景:比如社交网络中用户之间的关系,网络设备之间的拓扑结构,以及显示生活中形形色色的网:公路网、铁路网、地铁网等等,都可以通过图来表示。
图的存储
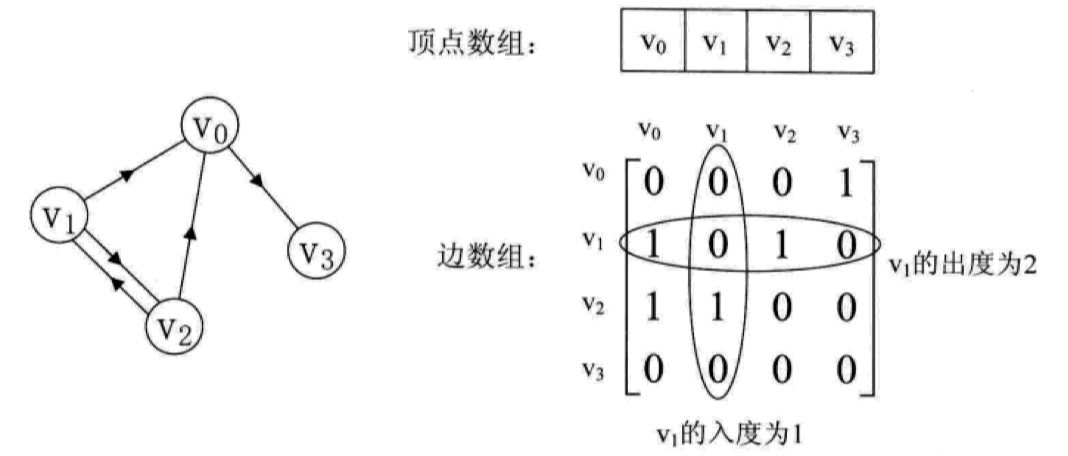
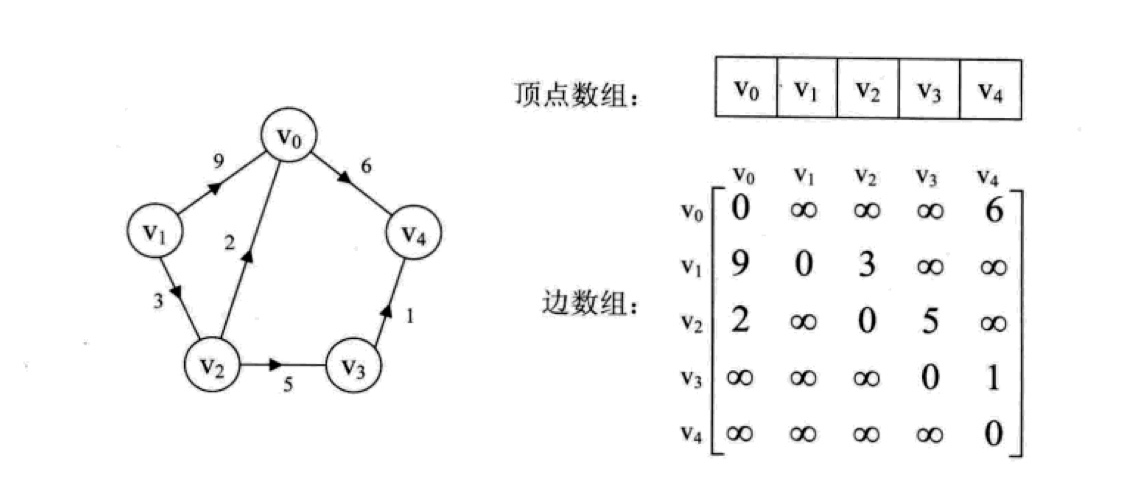
邻接矩阵
对于有 n 个顶点的图而言,时间复杂度是 O(n^2),空间复杂度也是如此,而且如果图比较稀疏的话(稀疏图),边数组会存在巨大的空间浪费。但是优点是实现起来非常简单,对于稠密图或者非常简单的图来说,用邻接矩阵是比较方便的。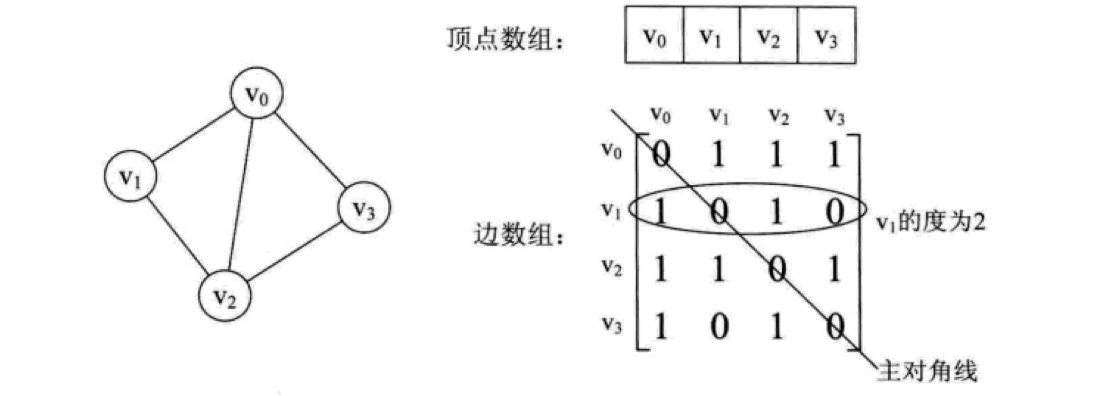
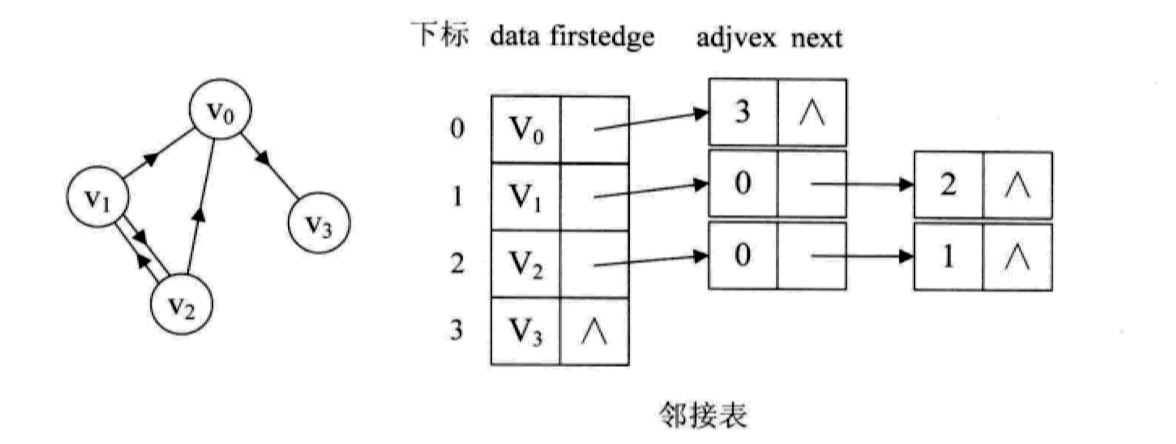
邻接表
邻接表的构建时间复杂度要比邻接矩阵好,对于一个有 n 个顶点和 e 条边的图而言,时间复杂度是 O(n+e),而且不存在任何空间的浪费,比较高效,可用于存储任何图。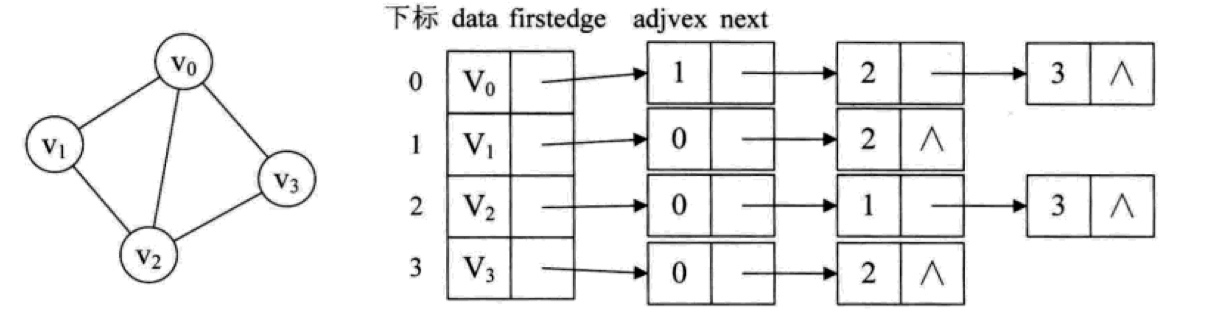
图的遍历
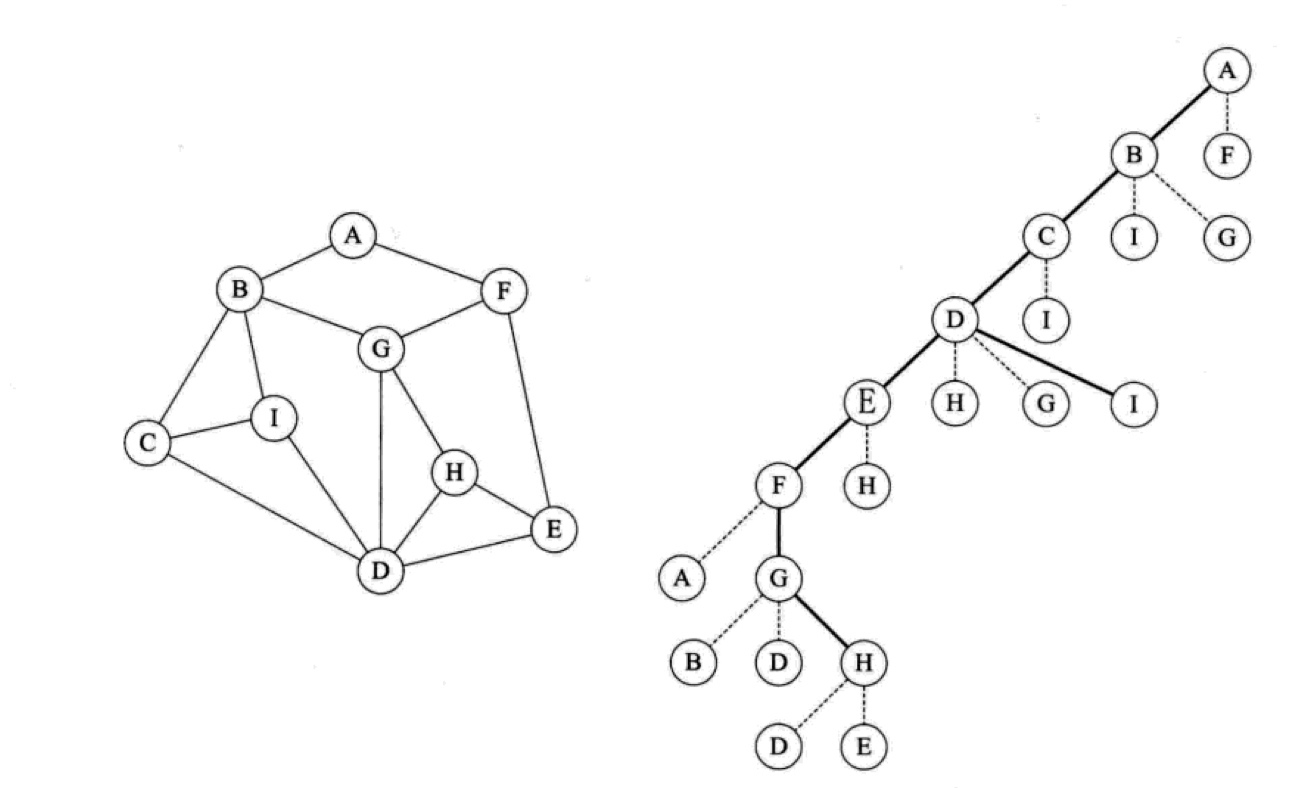
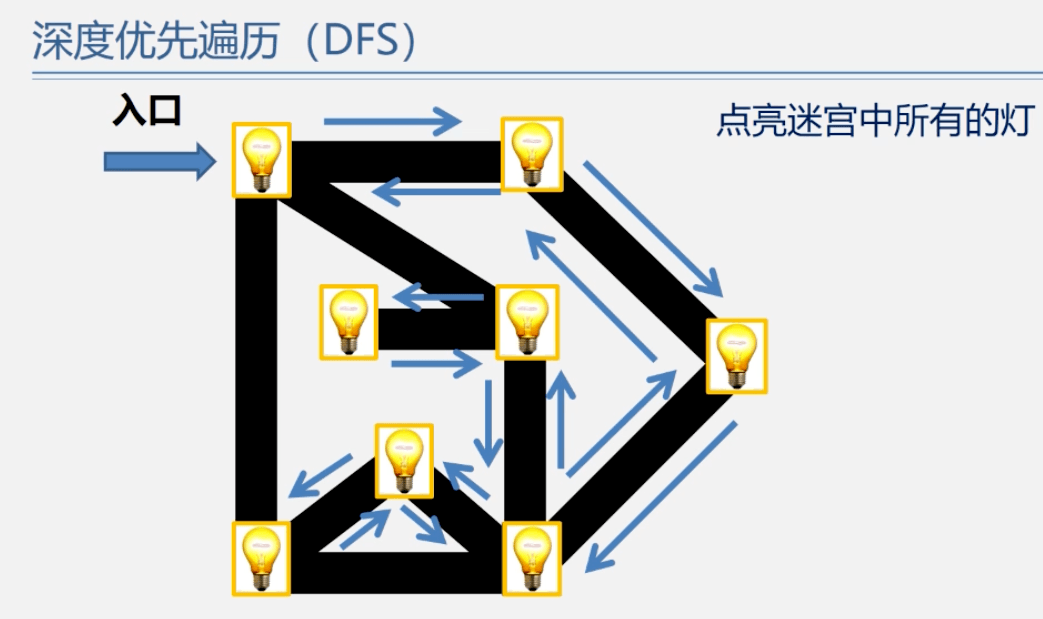
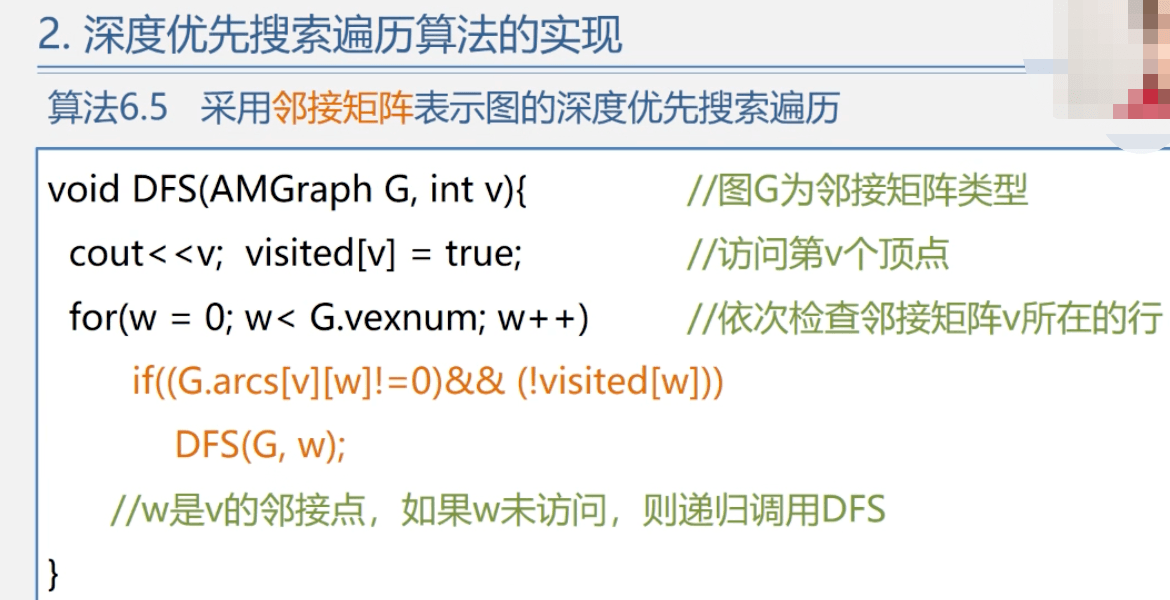
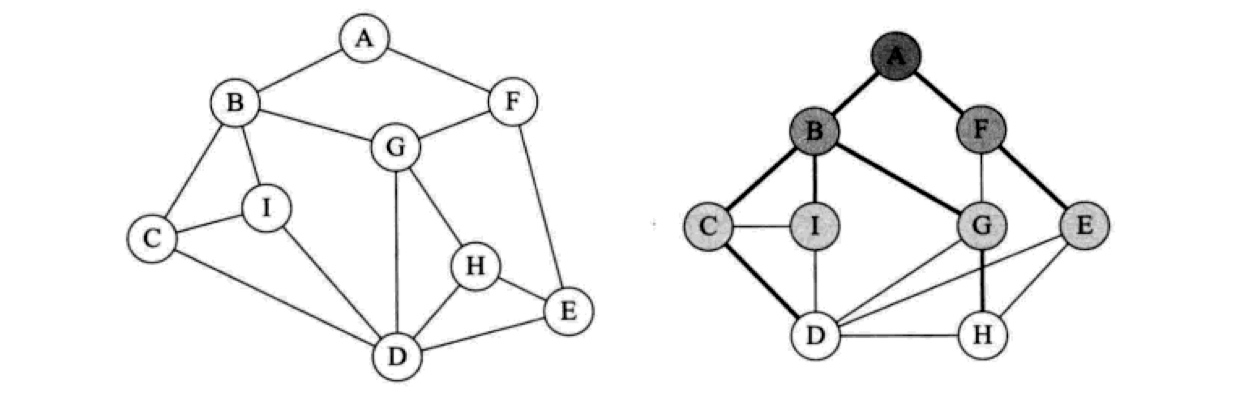
深度优先搜索(DFS)
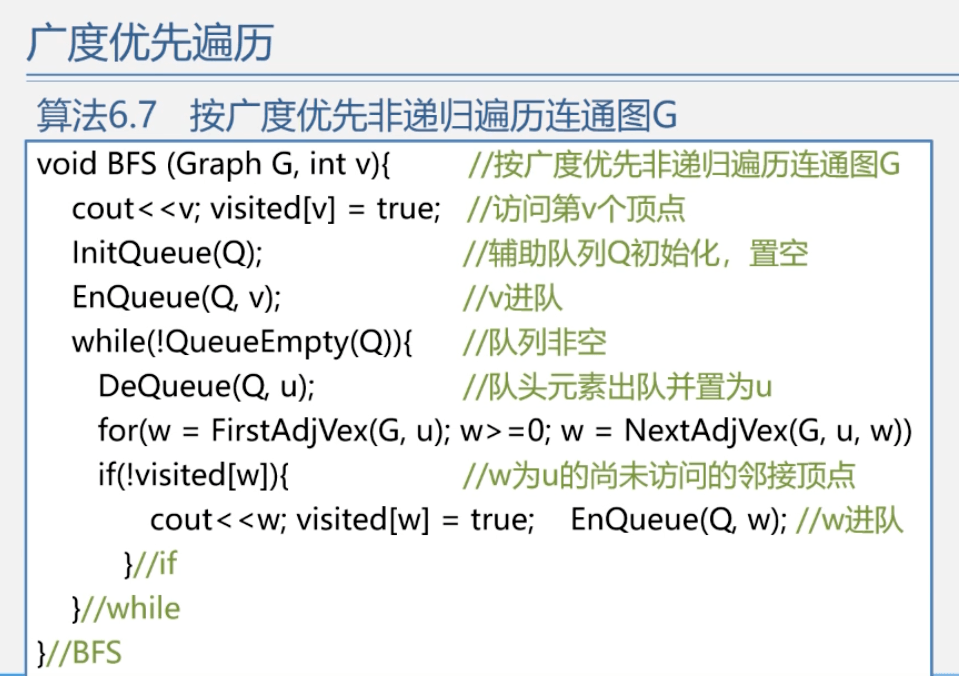
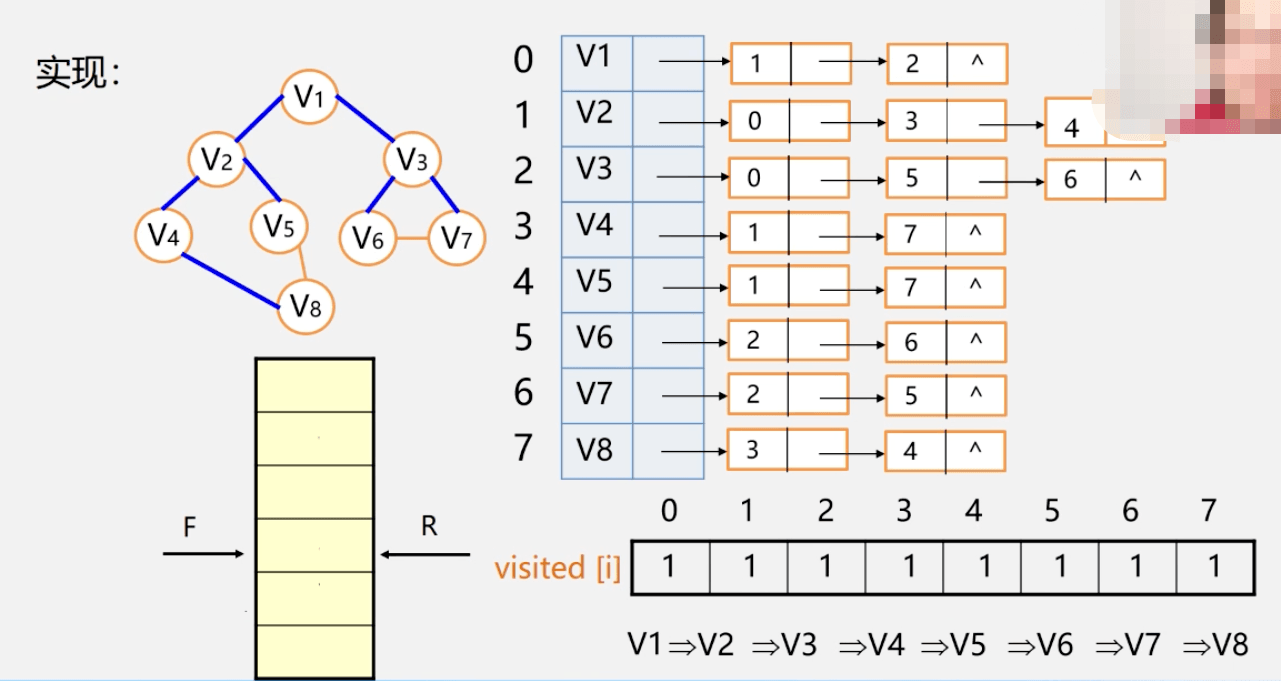
广度优先搜索(BFS)
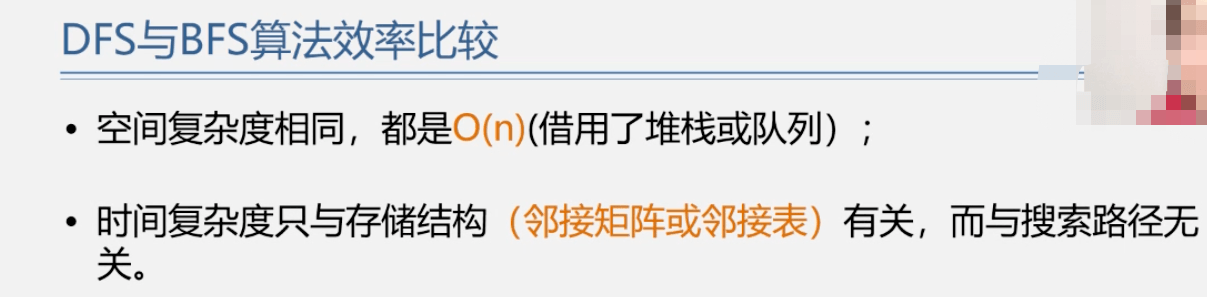
广度优先搜索的时间复杂度和深度优先搜索一样,也是 O(v+e),其中 v 表示顶点数,e 表示边数,需要额外的数组存储已访问顶点和前驱顶点,对应的空间复杂度是 O(v)。
广度优先搜索和深度优先搜索的复杂度完全一样,没有优劣之分,具体使用哪种搜索方式,以实际情况为准。
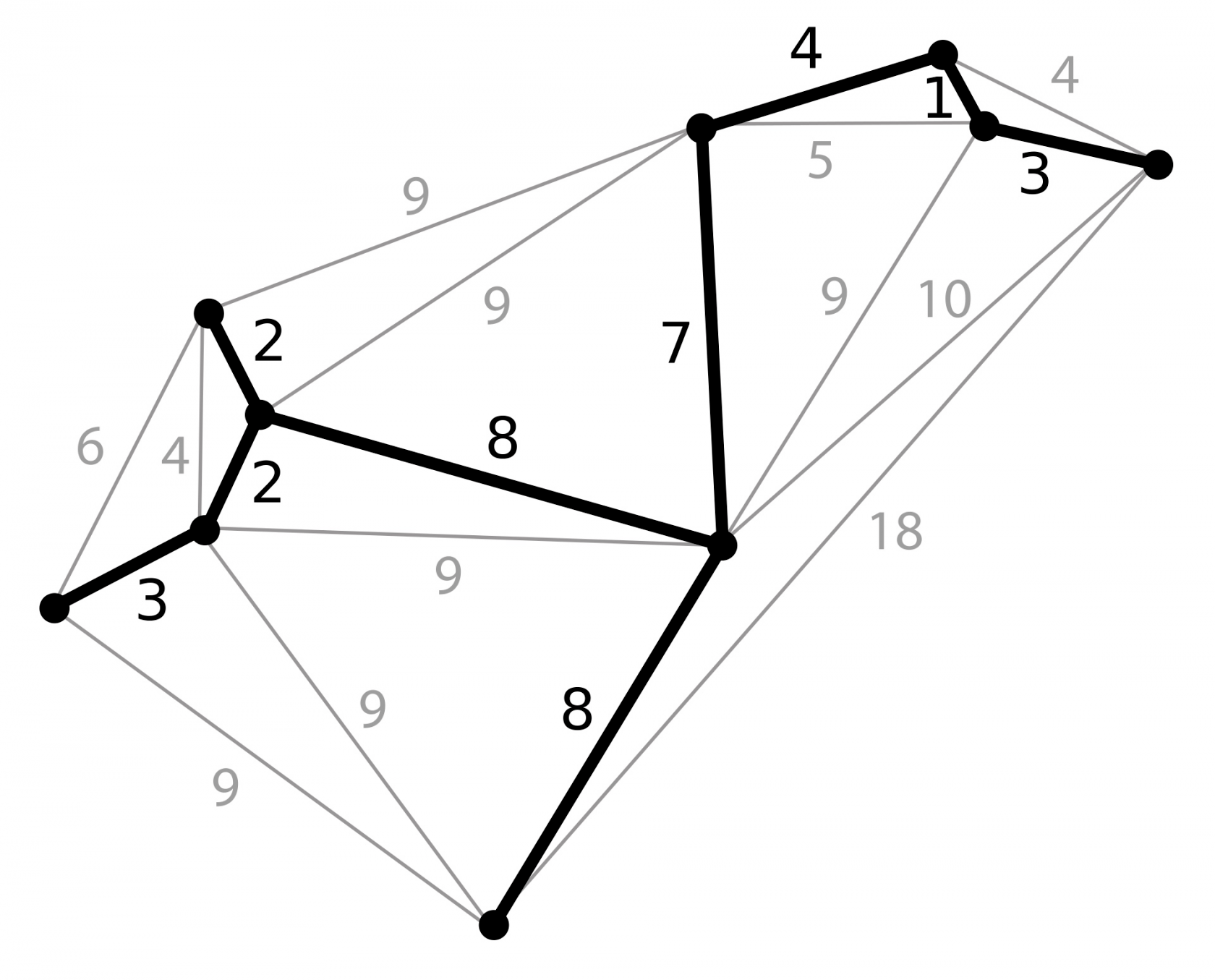
最小生成树
应用场景:规划路径让交通费用最低,国家的电力网、公路网、通信网,规划路径让建设成本最低,计算出最佳路径,连接网络中所有节点的最优路径问题,都可以通过最小生成树来处理。
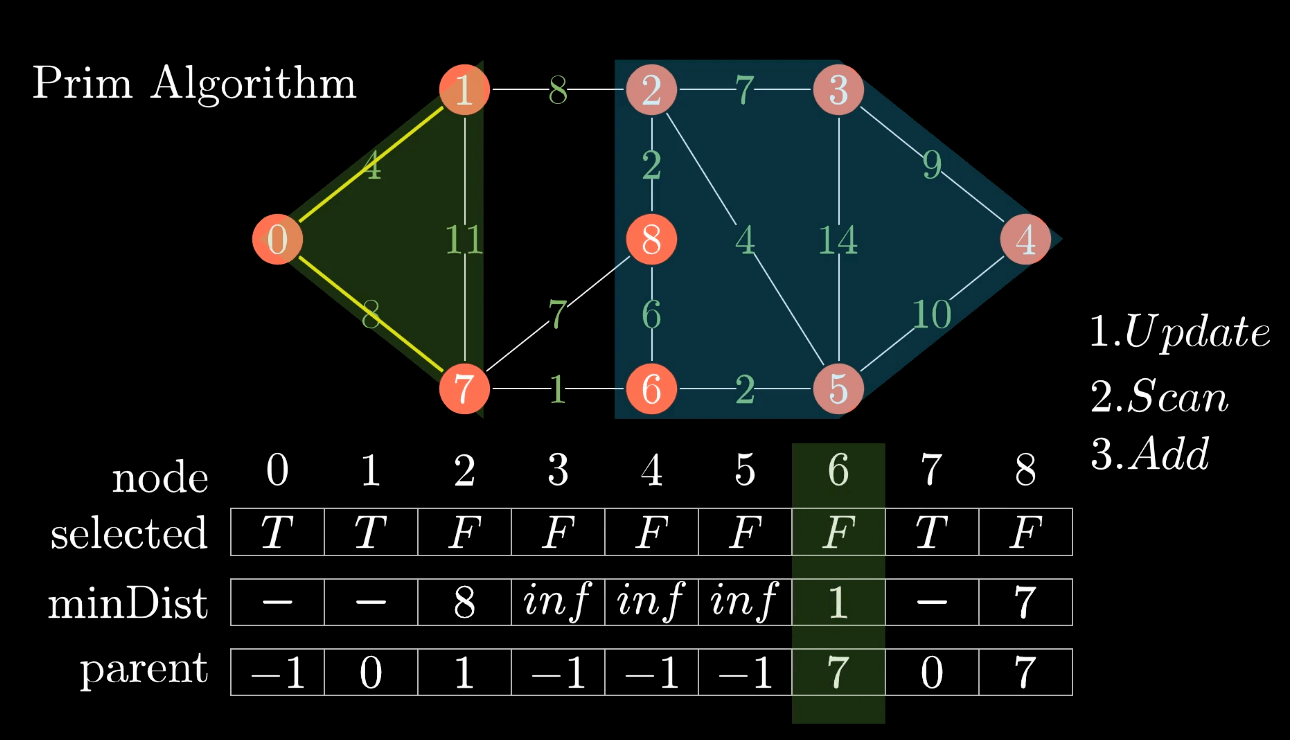
普里姆算法(Prim)
最小生成树 prim 算法采用了贪心策略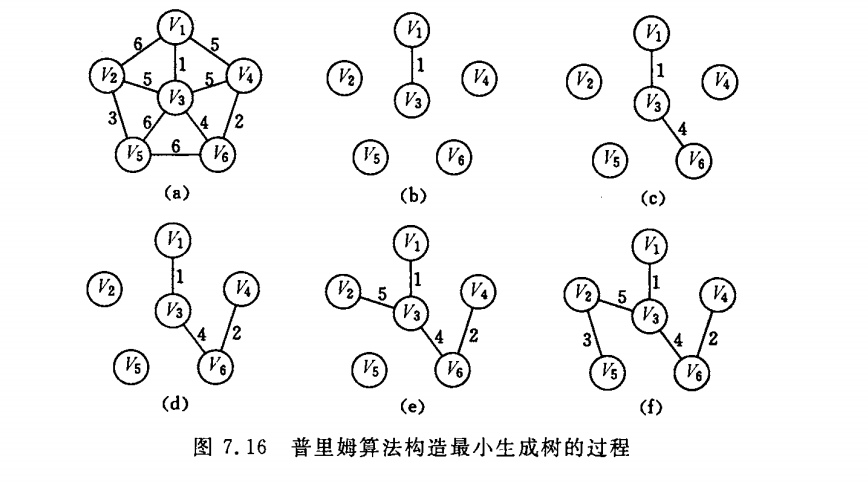

克鲁斯卡尔算法(Kruskal)
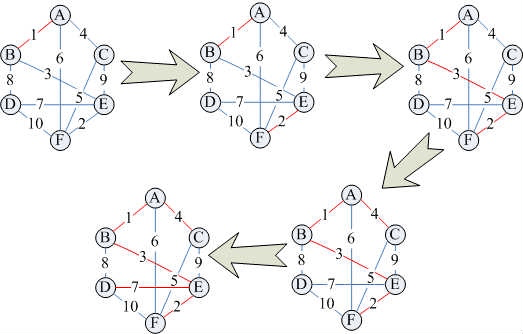
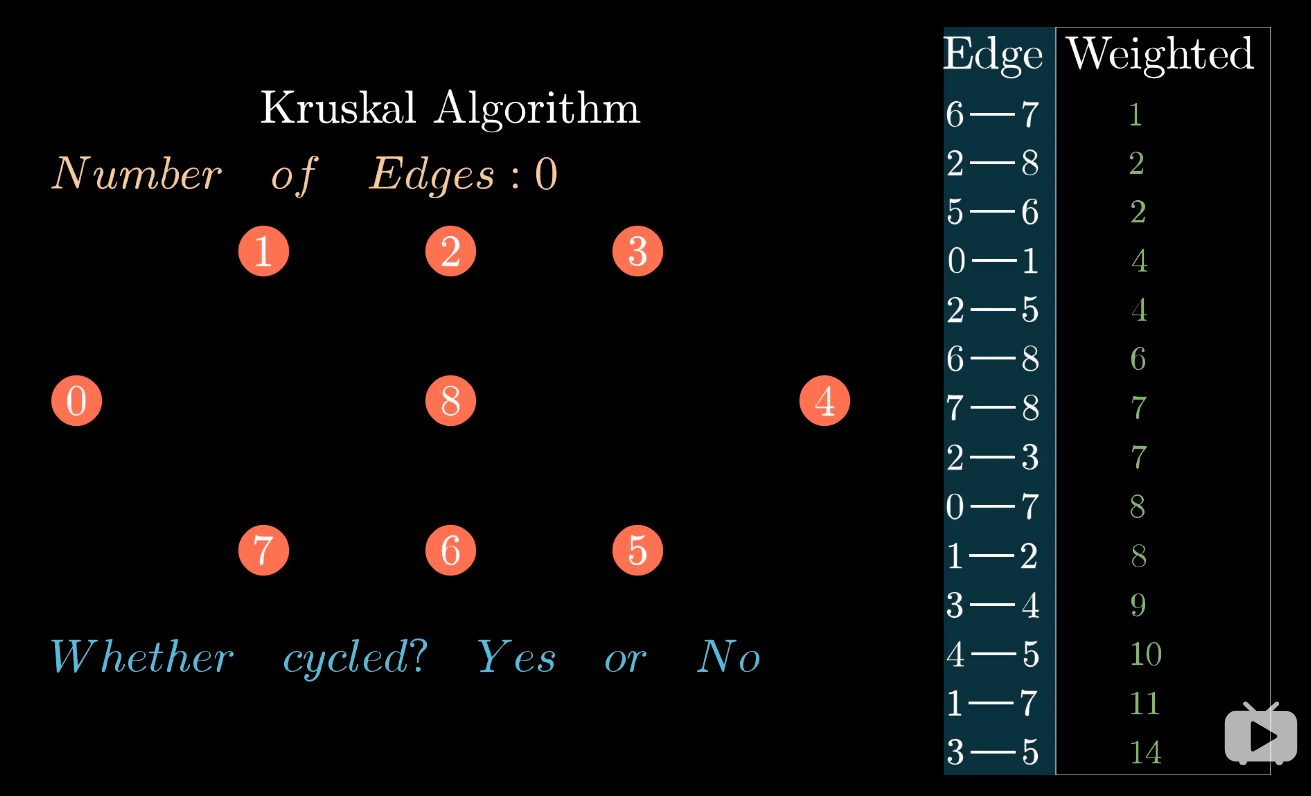
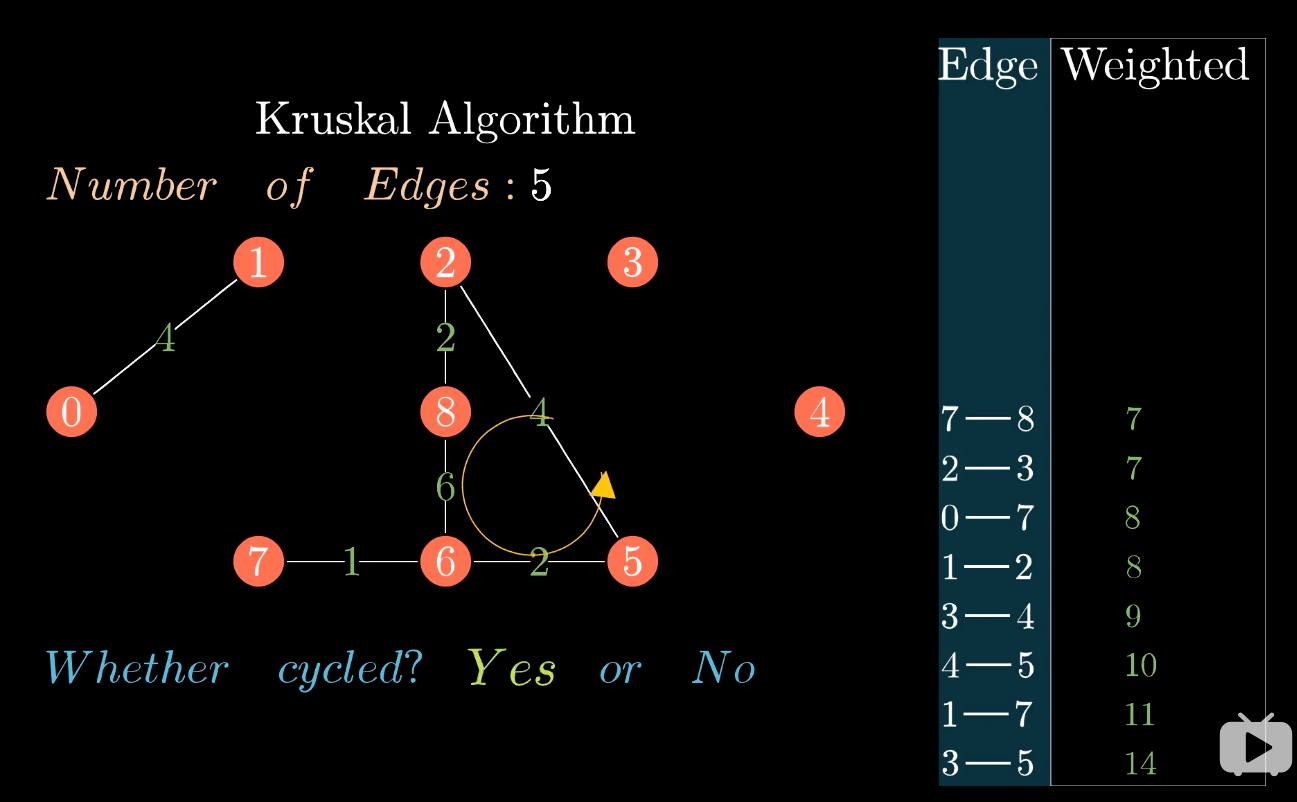
组成环则丢弃
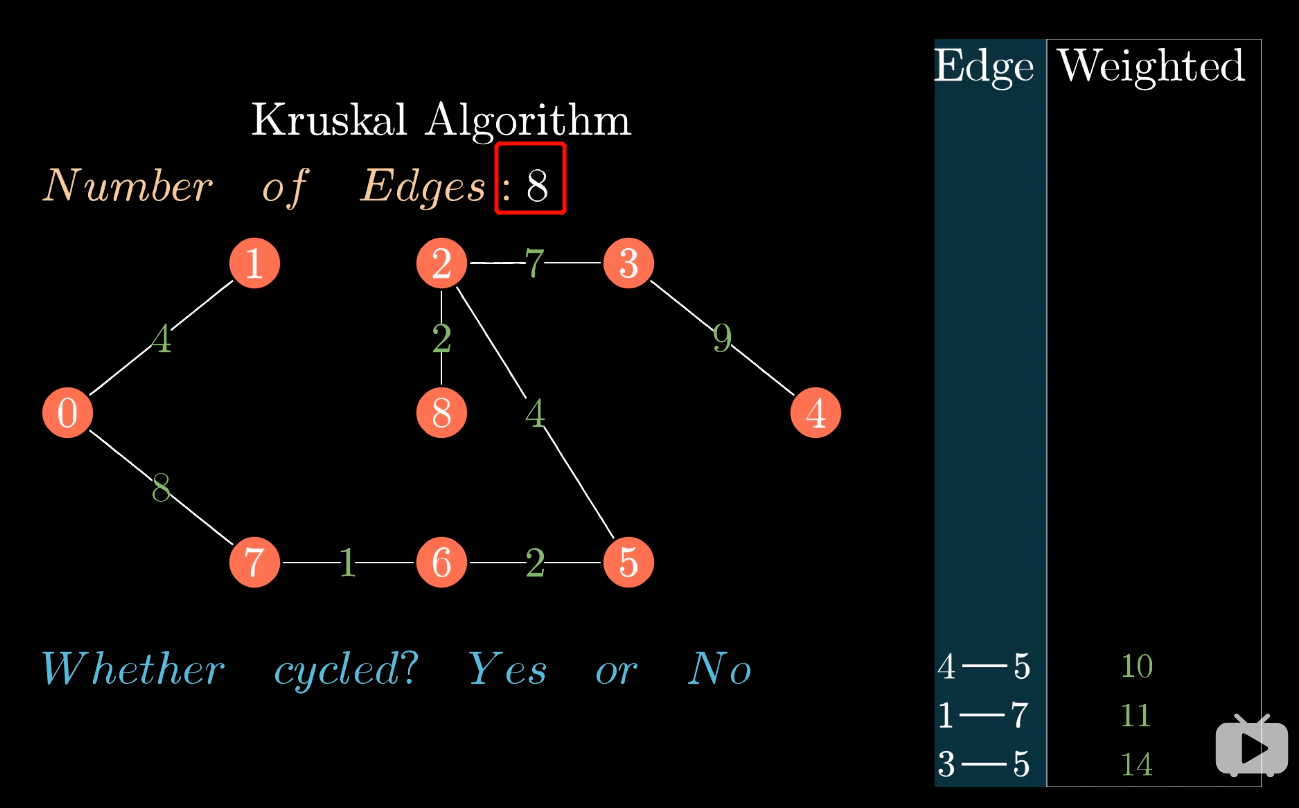
直到选择了 N-1 条边即完成
最短路径
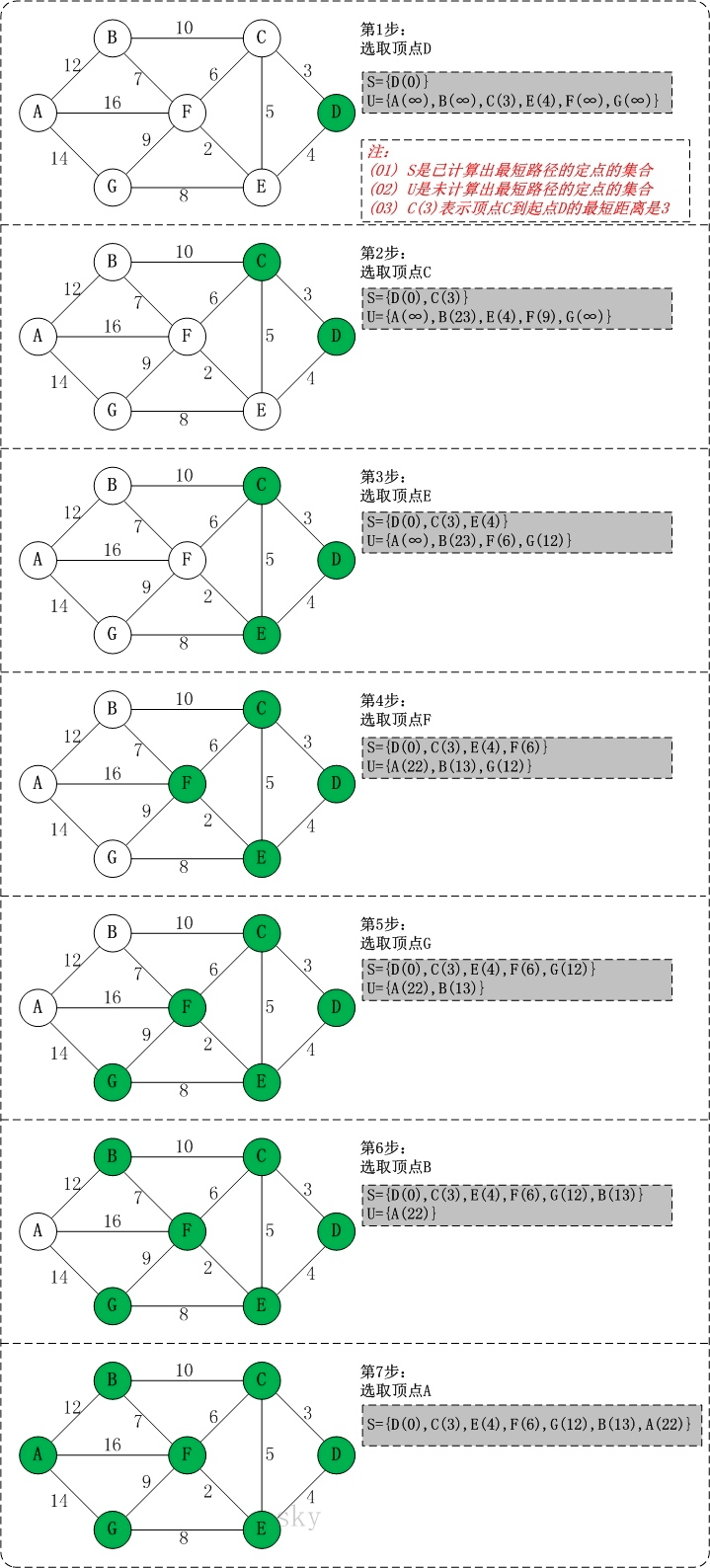
迪杰斯特拉算法(Dijkstra)
贪心策略
和 prim 算法很类似,Dijkstra 计算距离是累加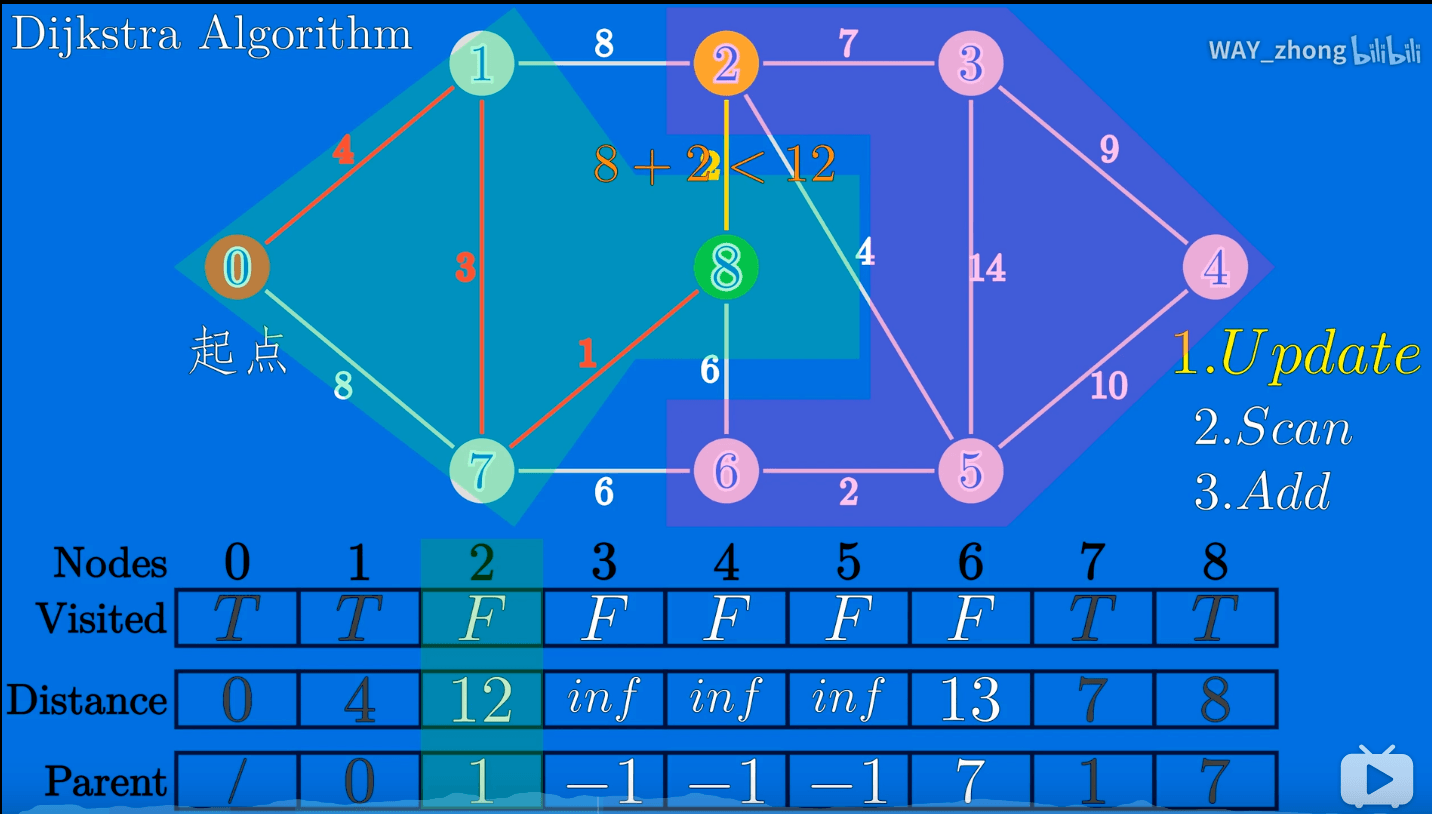

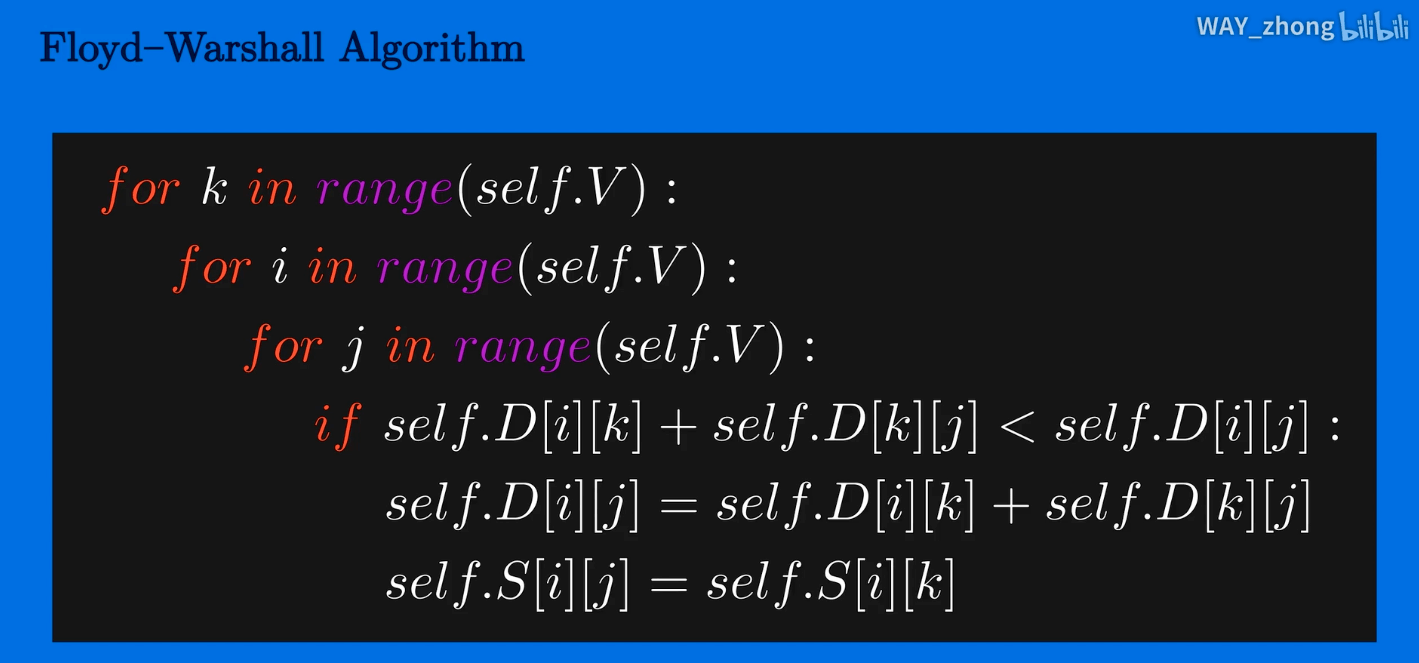
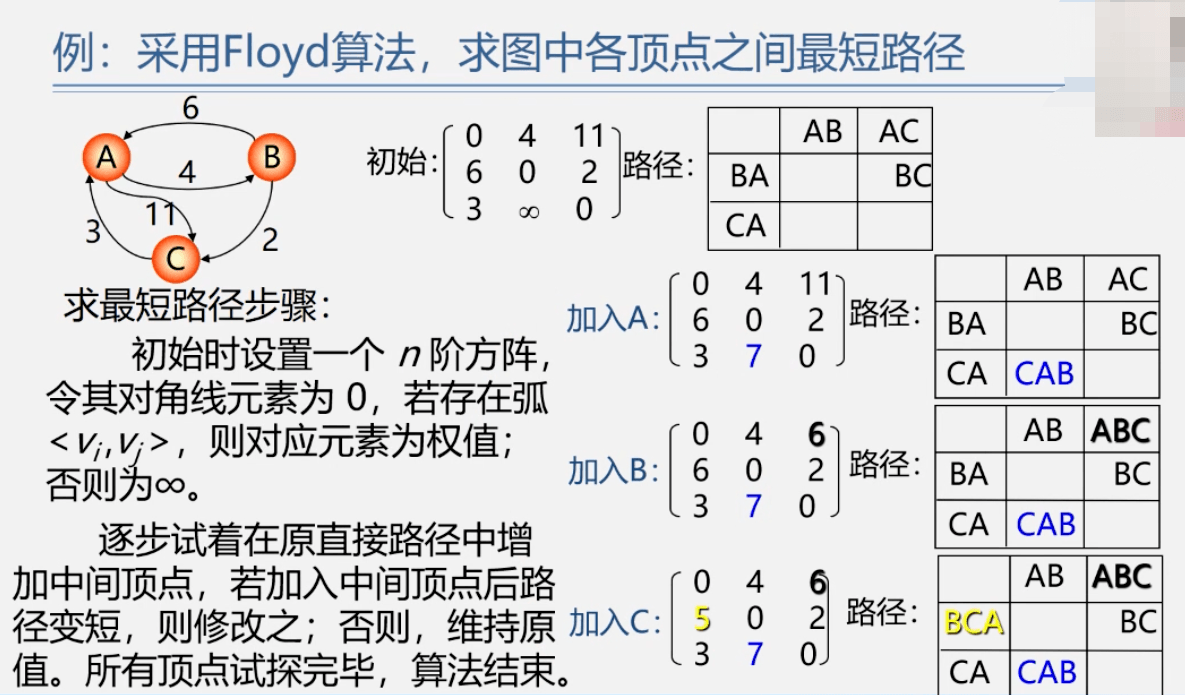
弗洛伊德算法(Floyd)
动态规化思想
prim,kruskal 和 dijkstra 算法有贪心策略
- prim:每次执行都选择轻边
- kruskal:每次执行都选择权值最小的边,同时合并两个不相交的子集
- dijkstra:每次执行都选择路径最短 d (s,t),并将顶点 t 加入到集合 S 中,同时对边进行松弛
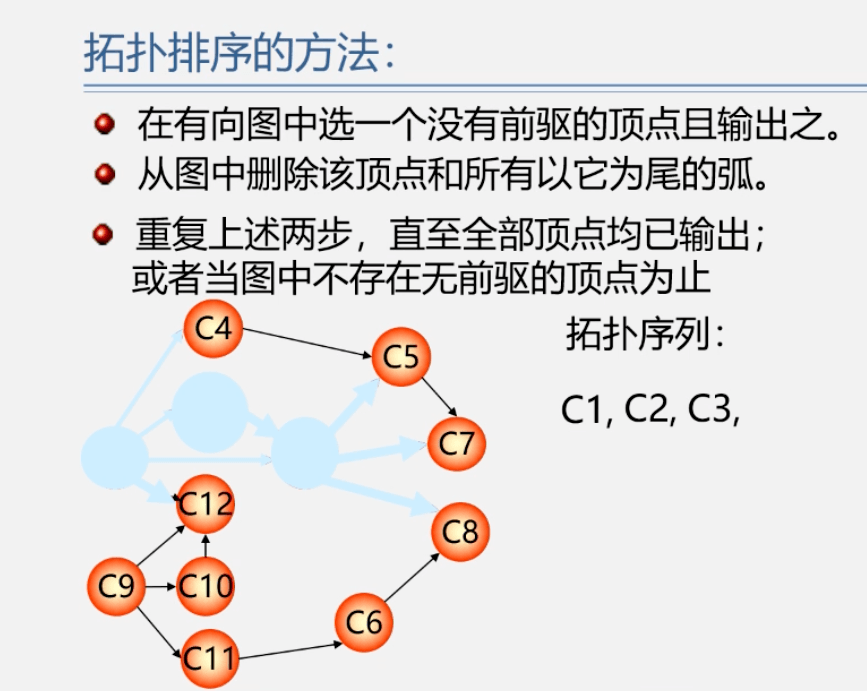
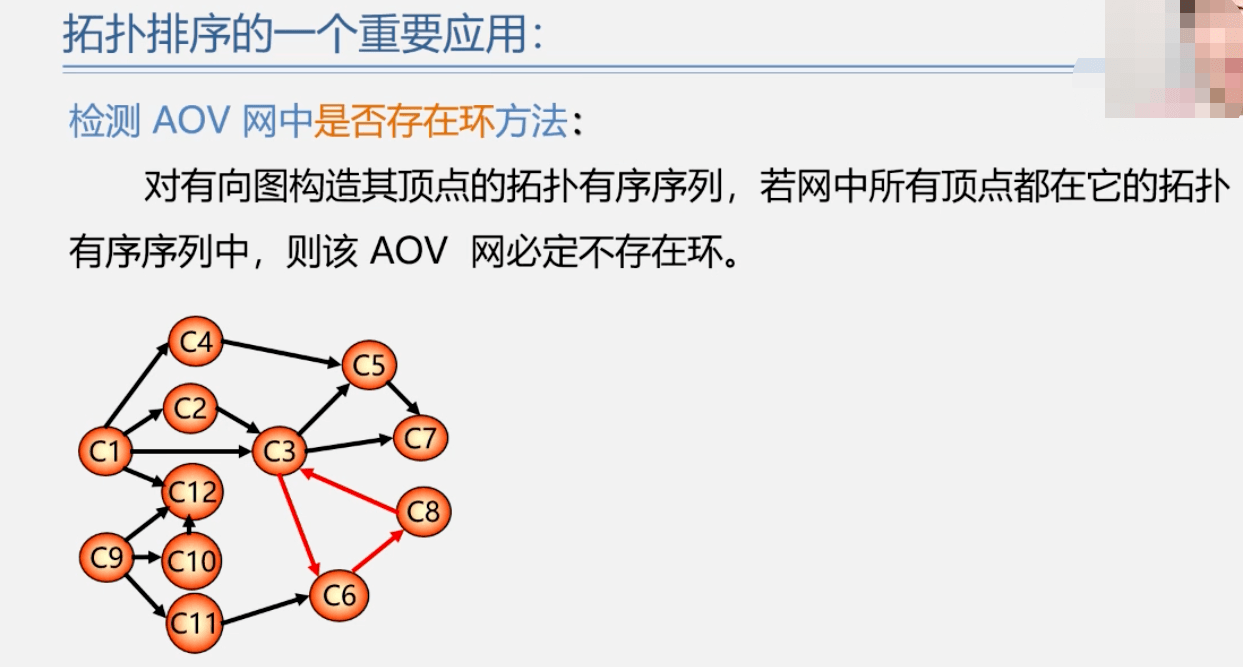
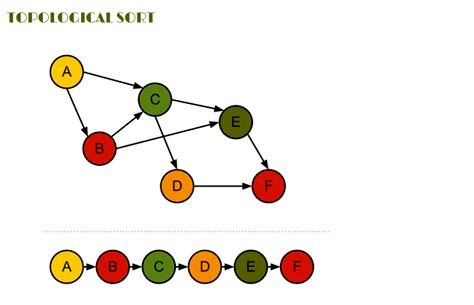
拓扑排序(AOV 网)
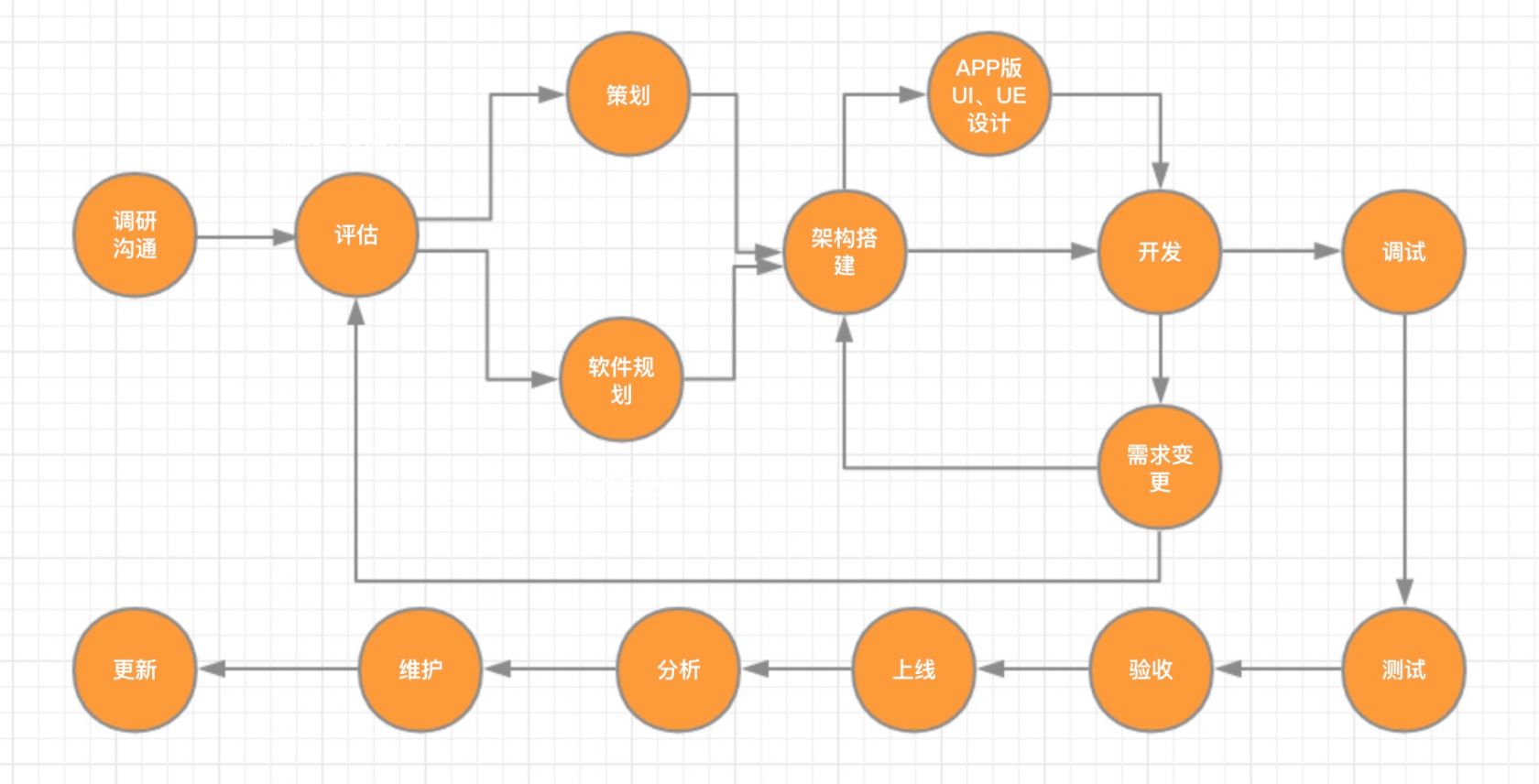
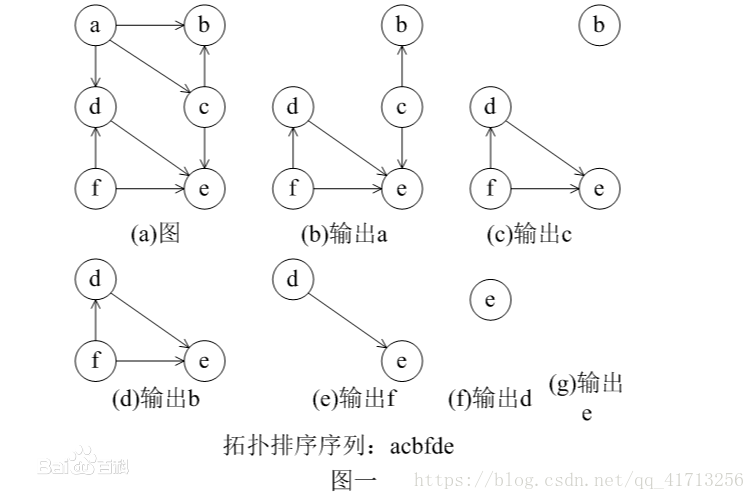
应用
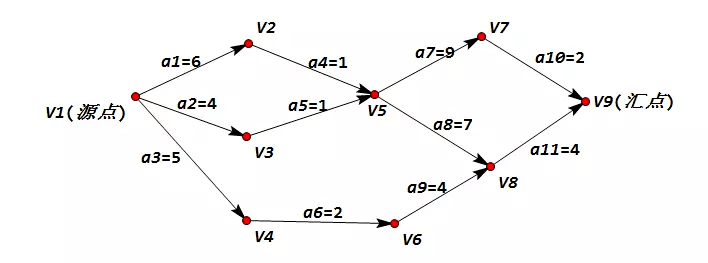
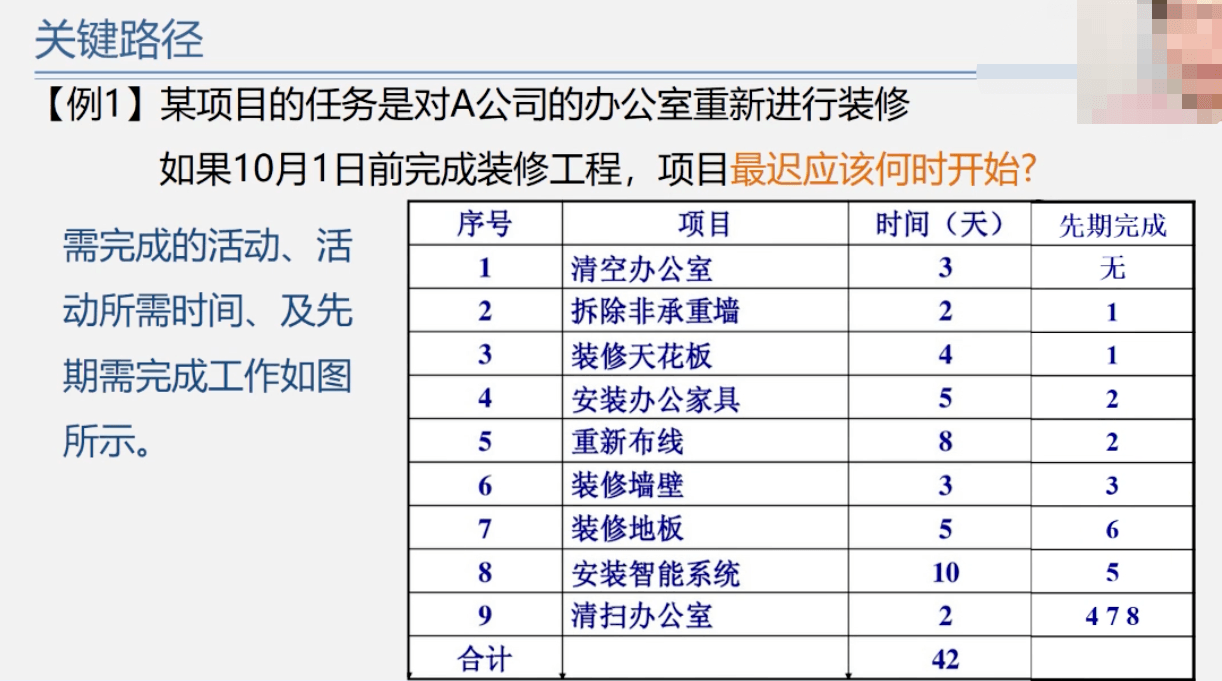
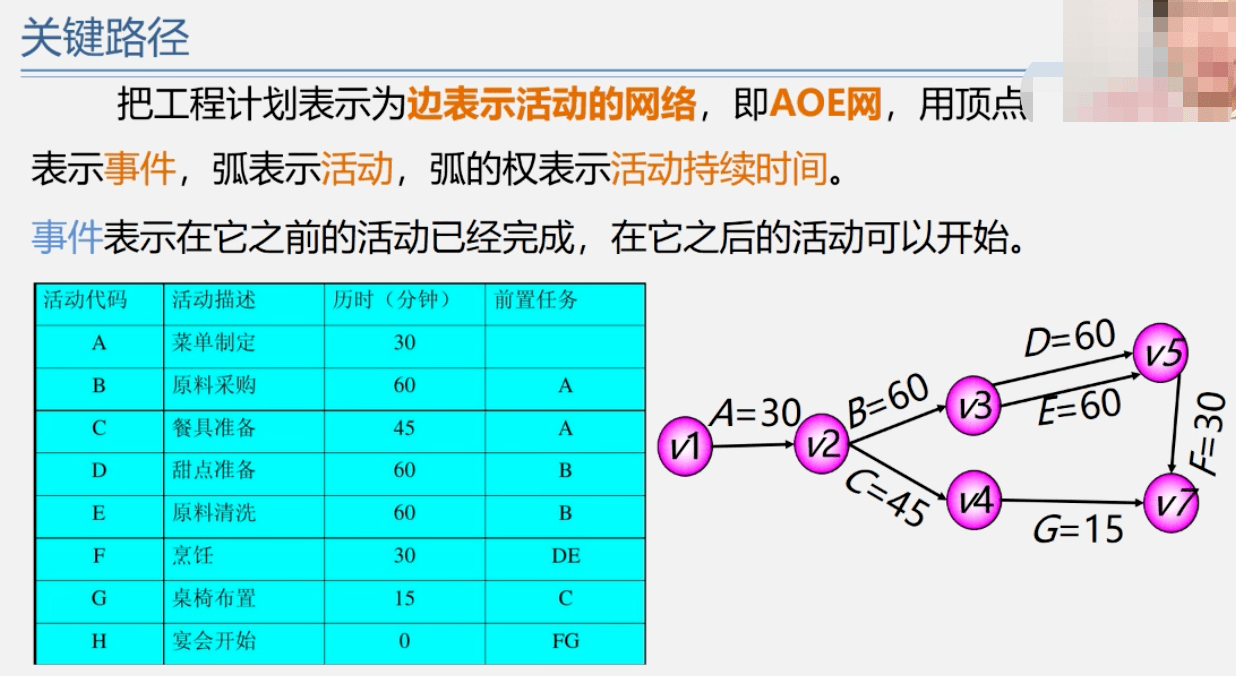
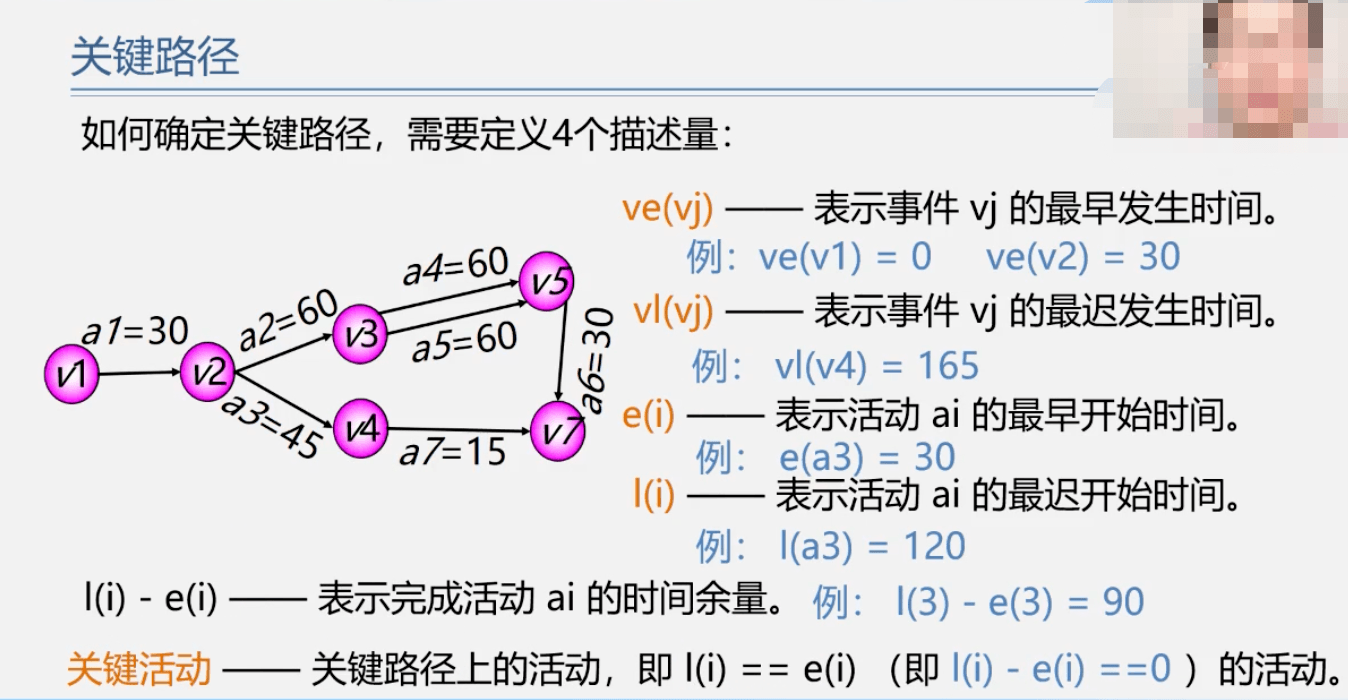
关键路径







 关于 LearnKu
关于 LearnKu




推荐文章: